|
Fuzzy Logic Tools
v1.0.5.1
|
|
Fuzzy Logic Tools
v1.0.5.1
|
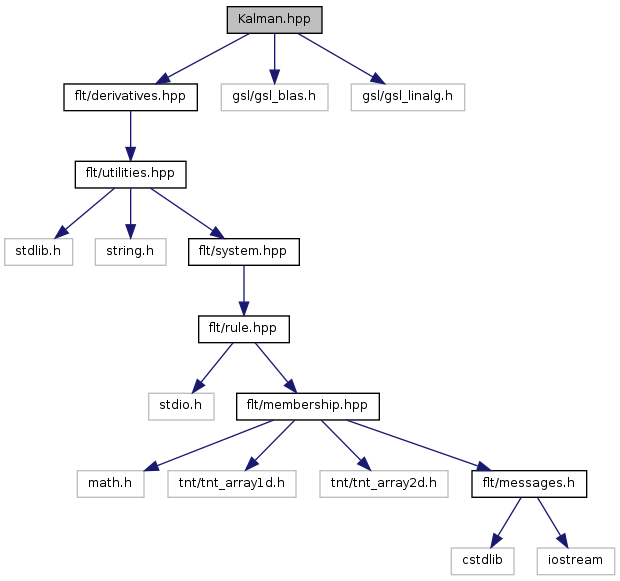
Implements the adaptation of a fuzzy model by the extended Kalman filter. More...
Go to the source code of this file.
Namespaces | |
| FLT | |
| Fuzzy Logic Tools (FLT) namespace. | |
Functions | |
| TNT::Array1D< double > | FLT::KalmanAntec (System &Model, TNT::Array1D< double > &input, TNT::Array1D< double > &output, TNT::Array2D< double > &covariance, TNT::Array2D< double > &P, TNT::Array2D< double > &Phi) |
| Computes antecedets adjust by the discrete extended Kalman filter. More... | |
| TNT::Array1D< double > | FLT::KalmanAntec (System &Model, TNT::Array1D< double > &input, TNT::Array1D< double > &output, TNT::Array2D< double > &covariance, TNT::Array2D< double > &P) |
| Computes antecedets adjust by the discrete extended Kalman filter where Phi is assumed to be the identity matrix. More... | |
| TNT::Array1D< double > | FLT::KalmanConseq (System &Model, TNT::Array1D< double > &input, TNT::Array1D< double > &output, TNT::Array2D< double > &covariance, TNT::Array2D< double > &P, TNT::Array2D< double > &Phi) |
| Computes consequents adjust by the discrete extended Kalman filter. More... | |
| TNT::Array1D< double > | FLT::KalmanConseq (System &Model, TNT::Array1D< double > &input, TNT::Array1D< double > &output, TNT::Array2D< double > &covariance, TNT::Array2D< double > &P) |
| Computes consequents adjust by the discrete extended Kalman filter where Phi is assumed to be the identity matrix. More... | |
| TNT::Array1D< double > | FLT::KalmanFuz (System &Model, TNT::Array1D< double > &input, TNT::Array1D< double > &output, TNT::Array2D< double > &covariance, TNT::Array2D< double > &P, TNT::Array2D< double > &Phi) |
| Computes the simultaneous adjustment of antecedets and consequents by the discrete extended Kalman filter. More... | |
| TNT::Array1D< double > | FLT::KalmanFuz (System &Model, TNT::Array1D< double > &input, TNT::Array1D< double > &output, TNT::Array2D< double > &covariance, TNT::Array2D< double > &P) |
| Computes the simultaneous adjustment of antecedets and consequents by the discrete extended Kalman filter where Phi is assumed to be the identity matrix. More... | |
Implements the adaptation of a fuzzy model by the extended Kalman filter.
 1.8.8
1.8.8

