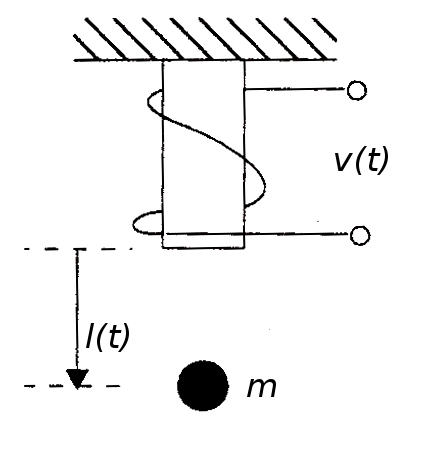
En la figura se puede observar el esquema simplificado de un sistema de levitación magnética similar al utilizado por los trenes de última tecnología. El campo magnético generado en la bobina a partir de la tensión de entrada $v(t)$, provoca la elevación de la bola de metal de masa m, de forma que controlando adecuadamente la tensión de entrada puede mantenerse suspendida la masa a una distancia $l(t)$ determinada. Dado el conjunto de ecuaciones que gobierna la dinámica del sistema, se desea estudiar el comportamiento del mismo, para lo cual se solicita:
 |
$m \dfrac{\text{d}^2 l(t)}{\text{d} t^2} = m g - \dfrac{i(t)^2}{l(t)}$
Masa → $m = 0.01 kg$ |
|
$${\small \mathbf{A} = \left.\left(\begin{array}{cccc} \dfrac{\partial f_1}{\partial x_1} & \dfrac{\partial f_1}{\partial x_2} & \cdots & \dfrac{\partial f_1}{\partial x_n}\\ \dfrac{\partial f_2}{\partial x_1} & \dfrac{\partial f_2}{\partial x_2} & \cdots & \dfrac{\partial f_2}{\partial x_n}\\ \cdots & \cdots & \ddots & \cdots\\ \dfrac{\partial f_n}{\partial x_1} & \dfrac{\partial f_n}{\partial x_2} & \cdots & \dfrac{\partial f_n}{\partial x_n}\\ \end{array}\right)\right|_{ \begin{array}{l} \mathbf{x}=\mathbf{x}_{eq}\\ \mathbf{u}=\mathbf{u}_{eq} \end{array} } }$$ |
$${\small \mathbf{B} = \left.\left(\begin{array}{cccc} \dfrac{\partial f_1}{\partial u_1} & \dfrac{\partial f_1}{\partial u_2} & \cdots & \dfrac{\partial f_1}{\partial u_m}\\ \dfrac{\partial f_2}{\partial u_1} & \dfrac{\partial f_2}{\partial u_2} & \cdots & \dfrac{\partial f_2}{\partial u_m}\\ \cdots & \cdots & \ddots & \cdots\\ \dfrac{\partial f_n}{\partial u_1} & \dfrac{\partial f_n}{\partial u_2} & \cdots & \dfrac{\partial f_n}{\partial u_m}\\ \end{array}\right)\right|_{ \begin{array}{l} \mathbf{x}=\mathbf{x}_{eq}\\ \mathbf{u}=\mathbf{u}_{eq} \end{array} } }$$ |
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()