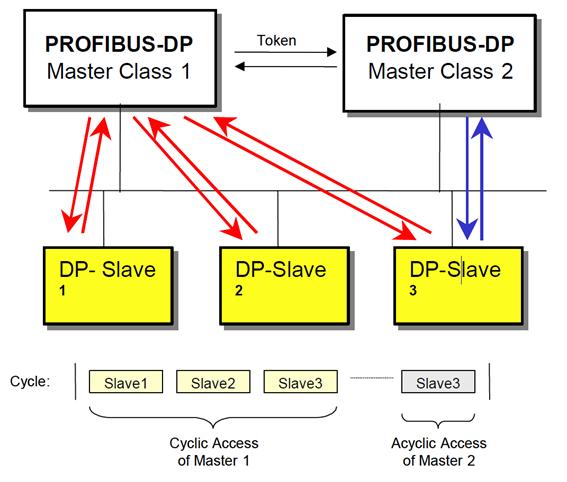
La característica clave de la versión DP-V1 es la función extendida para comunicaciones de datos acíclicas. Esto conforma los requerimientos para la parametrización y calibración de los dispositivos de campo a través del bus durante el tiempo de ejecución y para la introducción de mensajes de alarma confirmados. De forma paralela a la comunicación de datos cíclica, pero con menor prioridad, se ejecuta la transmisión de datos acíclica. La figura 13 muestra algunos ejemplos de secuencias de comunicación. El maestro de clase 1 tiene el testigo (token) y puede enviar mensajes o recuperarlos desde el esclavo 1, esclavo 2, etc. en una secuencia fijada hasta que este alcance el último esclavo de la lista (canal MS0); éste transfiere entonces el testigo al maestro de clase 2. Este maestro puede usar el tiempo restante disponible (“gap”) del ciclo programado para iniciar una conexión acíclica a cualquier esclavo (en la figura 13 esclavo 3) para intercambiar archivos (canal MS2); al final del tiempo del ciclo actual éste devuelve el testigo al maestro de clase 1. El intercambio acíclico de archivos puede durar varios ciclos de exploración o sus “gaps”; al final, el maestro de clase 2 utiliza el “gap” para terminar la conexión. De forma similar, al igual que el maestro de clase 2, el maestro de clase 1 también puede ejecutar intercambios de datos acíclicos con los esclavos (canal MS1).
En la tabla 7 se muestran servicios adiciones disponibles.
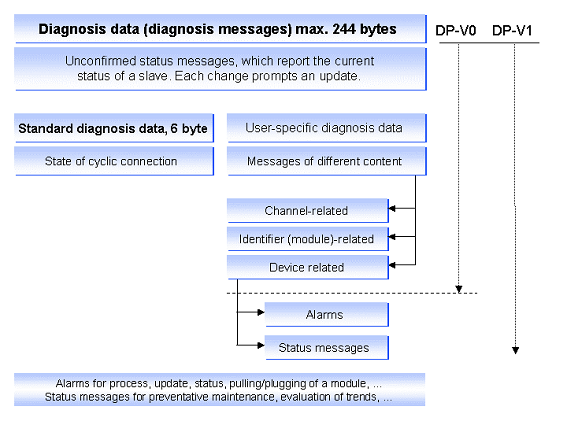
Como una función adicional, el diagnóstico específico del dispositivo de el DP-V1 ha sido mejorado y divido en las categorías de alarmas y mensajes de estado (ver figura 12).
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()