|
  
MASTER EN INGENIERÍA DE CONTROL, SISTEMAS
ELECTRÓNICOS E INFORMÁTICA INDUSTRIAL
INFORMÁTICA
INDUSTRIAL
Las
asignaturas relacionadas son:
- Redes neuronales
y lógica borrosa
- Robótica
Industrial y manipuladores
- Sistemas
empotrados
- Robótica
móvil
- Tratamiento
digital de imágenes
- Ingeniería
de Redes de Comunicaciones
Redes
neuronales y lógica borrosa
La
asignatura consta de un temario teórico en el que se estudian las Redes
Neuronales y la lógica borosa. Conjuntamente con el desarrollo de la
teoría se resuelven problemas relacionados con el temario mediante
MATLAB, y se proponen trabajos que
serán la fuente principal de evaluación de la asignatura. y se proponen trabajos que
serán la fuente principal de evaluación de la asignatura.
En primer lugar se realiza una introducción a la Lógica Borrosa y sus
aplicaciones. A continuación, se estudian los fundamentos de los
sistemas borrosos y los distintos métodos de inferencia existentes.
Posteriormente se estudia la extracción de modelos lingüísticos a
partir del conocimiento de un experto, así como el modelado
neuro-borroso. Finalmente se hará una introducción al control borroso.
Introducción y aplicaciones de las redes neuronales. Pasos para obtener
un modelo. Pre-procesamiento de datos. Filtros lineales con ganancia y
retraso. Neurona. Funciones de activación. Capa de neuronas. Red
neuronal multicapas. Métodos de adaptación paramétrica. Red dedicada.
Red de base radial. Redes de aprendizaje competitivo. Mapas
autoorganizados. Técnicas de validación. Ejemplos de aplicación.
Robótica Industrial y manipuladores
Representación de la posición y la orientación en
el espacio. Cinemática directa e inversa de los
manipuladores. Jacobiano del manipulador. Dinámica y modelado de los
manipuladores. Generación de trayectorias. Control de un eslabón.
Control no lineal de los manipuladores. Lenguajes y programación de
robots. Sensores en los manipuladores. Análisis de estabilidad en
técnicas de control aplicables a los manipuladores. Ejemplo de diseño
de un manipulador de tipo SCARA.

Sistemas
empotrados
La
asignatura "Sistemas Empotrados" se encuentra en el Máster como una
profundización en sistemas basados en microcontroladores realizados a
medida. Por lo tanto, se verá como una nueva visión de los sistemas
digitales y de la arquitectura de computadores específicos, así como su
interacción, profundizando en la parte hardware del sistema.
A lo
largo de dicha asignatura se realizará un montaje en una placa de
desarrollo de FPGA, en la cual se programará un microcontrolador y una
serie de unidades de entrada/salida para solucionar un problema
determinado. Para ello se utilizarán las herramientas de diseño de
Mentor Graphics y Xilinx.
Robótica móvil
En esta asignatura se proporciona al estudiante
los fundamentos teóricos y prácticos que le permitirán  comprender, analizar y
diseñar estrategias para el control y navegación autónoma de robots
móviles. comprender, analizar y
diseñar estrategias para el control y navegación autónoma de robots
móviles.
La asignatura se divide en tres grandes bloques:
1.-Actuadores y sistemas de ayuda a la navegación;
2.- Características y Modelado de robots móviles;
3.- Control de robots móviles.
A lo largo de ellos se abordarán aspectos de bajo nivel, como por
ejemplo el control de actuadores con microcontroladores. También se
estudiarán desarrollos teóricos, como los fundamentos de la cinemática
de vehículos. Además, se presentarán estrategias de control de alto
nivel, tales como el control basado en comportamientos o las técnicas
de navegación reactiva. Durante el curso está planificada la
realización de un conjunto de prácticas de laboratorio que reforzarán
el contenido teórico presentado en clase.
Tratamiento digital de imágenes
La
asignatura tiene por objeto el estudio de las Técnicas de Tratamiento
Digital de Imágenes. Cualquier imagen se puede modelar por una función
de dos o tres variables. En el caso de imágenes estáticas los dos
argumentos de la función son las coordenadas (x, y) del plano
cartesiano, mientras que si las imágenes van cambiando en el tiempo
(dinámicas) necesitamos una tercera coordenada t que nos especifica el
tiempo.
Punto de la Imagen: (x, y, t) -> f(x, y, t) : Intensidad Luminosa
Dicha función suele ser una función digital (dominio discreto y rango
discreto). Las imágenes reales suelen ser continuas. Para poder
trabajar con ellas en un ordenador, será necesario digitalizarlas. Este
proceso comprende dos fases principales: el muestreo y la
cuantificación.
Ingeniería de Redes de Comunicaciones.
Se
trata de una asignatura que, enmarcada en el título de posgrado del
Máster de ICSEII, forma al alumno sobre las arquitecturas de redes de
computadores en cuanto a su infraestructura 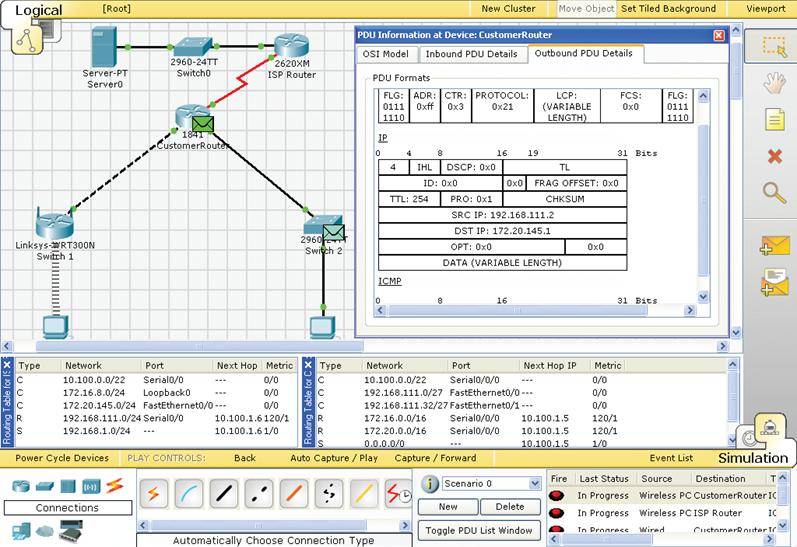 hardware, configuración y
diseño de redes de comunicación. hardware, configuración y
diseño de redes de comunicación.
Por tratarse de estudios de posgrado, la formación del alumno se
orienta tanto al acceso laboral como al posible acceso a los estudios
de Tercer Ciclo. Además de impartir una formación general, enfocada a
los conceptos y bases teóricas que permitan una visión académica y
científica de las redes de computadores, sus contenidos están
integrados en el currículo de la Academia DIESIA Networking de CISCO.
Su orientación hacia la carrera profesional en infraestructuras de
redes y comunicaciones, posibilita desarrollar las competencias
profesionales como Técnico en Redes e Internet mediante la obtención de
la certificación CCNA1 de CISCO.
El curso es teórico-práctico con el apoyo didáctico de formación
E-learnig, uso de simuladores de última generación y realización de
prácticas en un laboratorio de la ETSI de La Rábida. Los conocimientos
básicos de redes de ordenadores, permiten convalidar la asignatura si
previamente se ha cursado la materia de Redes de primer ciclo de
Ingeniero Técnico Informático de Gestión o Sistemas. Los objetivos a
cubrir son los siguientes:
- La vida en un mundo centrado en la red
- Comunicación a través de la red
- Protocolos y funcionalidad de la capa de
aplicación
- Capa de transporte del modelo OSI
- Capa de red de OSI
- Direccionamiento de la red: IPv4
- Capa de enlace de datos
- Capa física del modelo OSI
- Ethernet
- Planificación y cableado de redes
- Configuración y verificación de su red
|














