|
GROVEX: Grupo de Robots para Vigilancia en Exteriores Investigador Principal: Fernando Gómez Bravo Equipo de Investigación: Federico Cuesta Rojo, , Begońa C. Arrue Ullés, J. Carlos Fortes Garrido, Diego A. López García, Marcos del Toro Peral, Estefanía Cortés Ancos , María del Pilar Polo Almohano. |
|
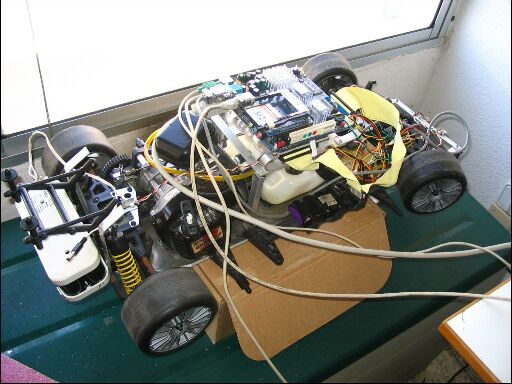
OBJETIVOS El presente proyecto trata de abordar la navegación autónoma y cooperativa de un grupo de robots móviles que serán construidos a partir de la adaptación de vehículos rodados a escala 1:5. La navegación estará orientada al desarrollo de tareas de vigilancia en exteriores para la seguridad civil en recintos de gran extensión. El proyecto se articula alrededor del robot ROVEX. Un robot autónomo construido en la Universidad de Huelva. La característica más notable de este vehículos es que dispone de motor de explosión y ha sido construido a partir de un vehículo vehículos a escala 1:5.
El robot
fue desarrollado en un TAD (Trabajo Académicamente
Dirigido) por el Alumno Alejandro García Jiménez
bajo la dirección de los profesores Fernando Gómez
Bravo y Javier Barragán Pińa.
|

|
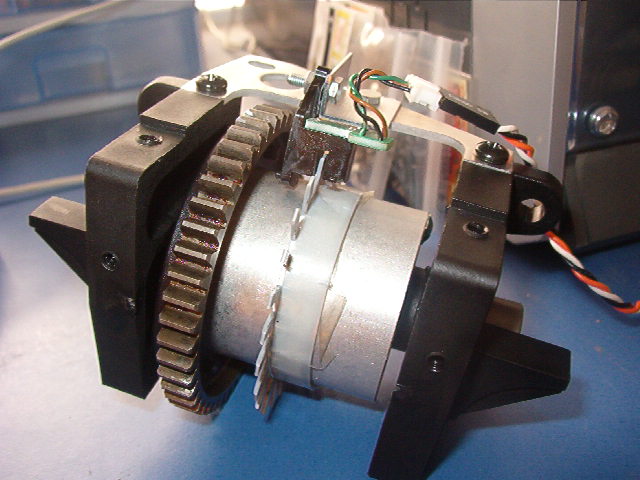
ACTUADORES
Se han utilizados servos de radiocontrol para posicionar la dirección del vehículo, actuar el acelerador y el freno. SISTEMA SENSORIAL Medición de la Velocidad
Posición de Servos
Los servos de radiocontrol se han modificado para poder medir la posición de los mismos Sistema de posicionamiento GPS En la actualidad se trabaja en la implantación de una sistema de navegación autónoma en circuitos urbanos utilizando el GPS Garmin GPS18-PC. En esta fase del proyecto se ha establecido una fructifera colaboración con la empresa de I+D Albatroz |
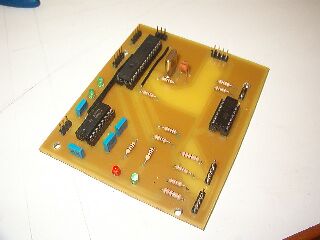
CONTROLADORES
ESQUEMA CONTROL
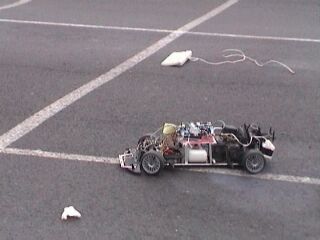
EXPERIMENTOS DE NAVEGACIÓN EN EXTERIORES
VIDEOS El control a baja velocidad es una tarea difícil en este tipo de vehículos, las irregularidades del terreno y la no linealidad del motor de explosión generan situaciones de navegación inestable |
||||
|



|
|||||