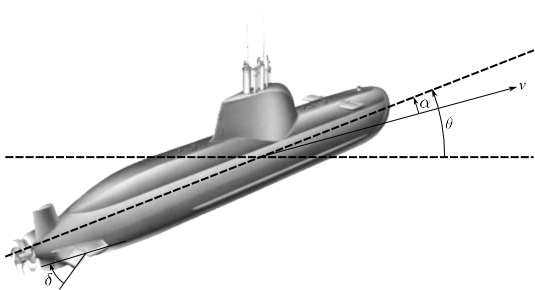
Para una velocidad $v$ constante, la dinámica del submarino de la figura viene determinada por el siguiente conjunto de ecuaciones diferenciales:
 |
$$ \begin{array}{l} \theta (t) = -125 \dfrac{\text{d}^2\theta (t)}{\text{d}t^2} - 15\dfrac{\text{d}\theta (t)}{\text{d}t} + 17 \alpha (t) - 14 \delta (t)\\~\\ \dfrac{\text{d}\alpha (t)}{\text{d}t} = 0.07 \dfrac{\text{d}\theta (t)}{\text{d}t} + 0.075 \delta (t) - 0.3 \alpha (t)\\~\\ \dfrac{\text{d}h (t)}{\text{d}t} = 8 \theta (t) - 8 \alpha (t) \end{array}$$ |
donde $\theta (t)$ es el ángulo con respecto a la horizontal, $\alpha (t)$ es el ángulo de ataque del submarino, $h(t)$ es su profundidad y $\delta (t)$ es la inclinación de la superficie de control (alerón de popa):
Se solicita:
Recuerde, siendo T el periodo de muestreo y el tiempo discreto, la derivada puede aproximarse por:
$$\dfrac{\text{d}x(t)}{\text{d}t} \simeq \dfrac{x(k+1) - x(k)}{T}$$
Solución.
1. Modelo de estado:
Asignamos variables de estado de la siguiente manera:
X1=θ(t) --> dX1=d θ(t) X3=α(t) --> dX3=dα(t)
X2= d θ(t) --> dX2= d2 θ(t) X4= µ(t) --> dX4=dµ(t)
Creamos el modelo de estado despejando las derivadas y el modelo de salida.
Modelo de estado (lineal):
dX1= X2
dX2= -0.008X1 -0.12X2+0.136 X3-14δ(t);
dX3= 0.07X2 0.075δ(t) -0.3X3;
dX4= 8X1 -8X3;
Modelo de salida (lineal):
µ(t) = X4
Si un modelo es lineal, se puede poner de forma matricial en la forma xpunto = A*x + B*u. para el modelo de estado y
y=C*x + D*u . (Las matrices A,B,C y D las podemos ver en el codigo fuente de Matlab adjunto).
2. Discretizar para T=0.01.
Usamos la fórmula vista en clase: x(k+1) = (1 + TA)x(k) + BTu(k) donde (1 + TA) será la matiz A discretizada y BT la matriz B discretizada.
Matlab nos da el resultado :
Código fuente de Matlab:
clc, clear all, close all
A=[0 1 0 0; -0.008 -0.12 0.136 0; 0 0.07 -0.3 0; 8 0 -8 0];
B=[0;-14;0.075;0];
C=[0 0 0 1];
D=0;
T=0.01;
Ad=eye(4)+T*A;
Bd=T*B;
Modelod=ss(Ad,Bd,C,D,T);
[y,t,x]=step(Modelod); / Simulamos frente a una entrada escalón
plot(t,y); title('apdo 3)'),xlabel('Tiempo'), ylabel('Profundidad'); / representamos gráficamente la salida.
4. En la figura se aprecia que al cambiar la inclinación (entrada) 1º el submarino se va sumergiendo y se quedará así siempre o hasta chocar con el fondo suponiendo que lo haya, luego el sistema es inestable.
Wikiapunte realizado por:
David Romero Delgado Francisco Canelo Santos
Sancho Santiago Blanco Enrique Casimiro-Soriguer Serrano
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()