Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
Resuelto. 2010, junio. Ejercicio 1 (4 puntos)
11 October, 2010 - 14:45 — Javier Barragán
 Versión para imprimir
Versión para imprimir
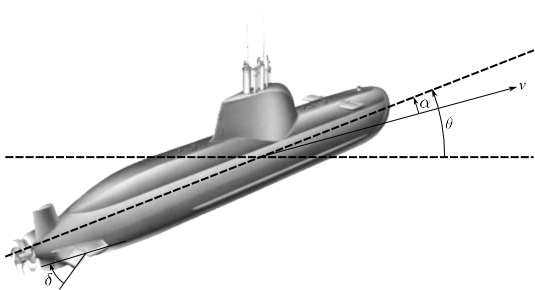
Para una velocidad $v$ constante, la dinámica del submarino de la figura viene determinada por el siguiente conjunto de ecuaciones diferenciales:
 |
$$ \begin{array}{l} \theta (t) = -125 \dfrac{\text{d}^2\theta (t)}{\text{d}t^2} - 15\dfrac{\text{d}\theta (t)}{\text{d}t} + 17 \alpha (t) - 14 \delta (t)\\~\\ \dfrac{\text{d}\alpha (t)}{\text{d}t} = 0.07 \dfrac{\text{d}\theta (t)}{\text{d}t} + 0.075 \delta (t) - 0.3 \alpha (t)\\~\\ \dfrac{\text{d}h (t)}{\text{d}t} = 8 \theta (t) - 8 \alpha (t) \end{array}$$ |
donde $\theta (t)$ es el ángulo con respecto a la horizontal, $\alpha (t)$ es el ángulo de ataque del submarino, $h(t)$ es su profundidad y $\delta (t)$ es la inclinación de la superficie de control (alerón de popa):
Se solicita:
- Obtenga un modelo de estado de tiempo continuo de orden 4 para el sistema.
- Discretice el modelo de estado anterior para un periodo de muestreo de 0.01s.
- Simule el modelo discretizado y represente la profundidad del submarino para una señal de control constante, $\delta (t)= 1^o$, suponiendo que inicialmente el submarino se encuentra en la superficie ($\theta(t) = {\text{d}\theta(t)}/{\text{d}t} = \alpha(t) = h(t) = 0$).
- Comente los resultados obtenidos. ¿Se puede decir que el sistema es estable? ¿Por qué?
Recuerde, siendo T el periodo de muestreo y el tiempo discreto, la derivada puede aproximarse por:
$$\dfrac{\text{d}x(t)}{\text{d}t} \simeq \dfrac{x(k+1) - x(k)}{T}$$
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()