Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
Máster
Contenidos relacionados con las asignaturas que imparto en los Másteres.
Proyecto SUR18
6 April, 2018 - 10:04 — Javier Barragán Un año más, y ya van 3 con este, hemos iniciado los preparativos para la celebración del Sustainable Urban Race 2018 (SUR18).
Un año más, y ya van 3 con este, hemos iniciado los preparativos para la celebración del Sustainable Urban Race 2018 (SUR18).
SUR18 es una competición de vehículos eléctricos solares, que tiene como objetivos promover un modelo de movilidad sostenible en la ciudad, incentivar al alumnado en el estudio de enseñanzas Científico-Técnicas de una manera práctica y acercar la Universidad a la sociedad.
![]()
Este año contamos con la colaboración de la Fundación Española para la Ciencia y la Tecnología (FECYT) - Ministerio de Industria, Economía y Competitividad, y de múltiples empresas e instituciones de la Provincia de Huelva, Faro (Portugal) y Badajoz. Además, por supuesto, contamos con el apoyo y patrocinio del Grupo de Investigación de Control y Robótica (TEP 192) al que pertenezco, del Departamento de Ingeniería Electrónica, Sistemas Informáticos y Automática, de la Escuela Técnica Superior de Ingeniería y la propia Universidad de Huelva.
- Inicie sesión para enviar comentarios
Cómo acceder a las revistas científicas desde casa de forma cómoda
20 January, 2016 - 18:32 — Javier BarragánTodos los que hemos buscado alguna vez un artículo científico desde casa hemos tenido el mismo problema: cuando lo encontramos está en una revista de pago y tenemos que acceder a la revista desde el proxy de la universidad o desde la sección de revistas electrónicas o bases de datos de biblioteca. El acceso es muy sencillo, basta con tener el PIN y acceder con nuestro nombre, apellidos y DNI, sin embargo, una vez hemos entrado en la revista debemos volver a buscar el artículo en cuestión, o copiar y pegar parte de la dirección web, para acceder a éste a través de la biblioteca y así poder descargarlo.
Este proceso se puede simplificar, y mucho, utilizando alguna extensión de redireccionamiento, lo que nos hará el cambio de dirección de forma automática y ya no tendremos que volver a realizar ese proceso nunca más. Por ejemplo, para Chrome está Switcheroo Redirector, y para Firefox Redirector, aunque supongo que habrá muchas otras que hagan la misma función.
Lo único que tenemos que hacer es elegir la dirección web origen (la dirección real de la revista o base de datos), y la dirección destino (la que nos proporciona el servicio Columbus de biblioteca una vez nos hemos registrado - o del servicio correspondiente a su Universidad o Institución -). Incluimos cada par en el redireccionador y listo. Por supuesto, la primera vez que lo usemos tendremos que poner nuestro nombre, apellidos, dni y pin para entrar en Columbus, pero a partir de ahí cada vez que accedamos a una de esas direcciones se nos modificará automáticamente para que pase a través de la biblioteca, y así accederemos al artículo inmediatamente y sin complicaciones.
Os pongo una lista con las redirecciones de los servicios que yo más utilizo, pero podéis ampliarla con cualquier dirección incluida en Columbus:
-
www.sciencedirect.com ---> 0-www.sciencedirect.com.columbus.uhu.es -
www.scopus.com ---> 0-www.scopus.com.columbus.uhu.es -
ieeexplore.ieee.org ---> 0-xplorebcpaz.ieee.org.columbus.uhu.es -
dl.acm.org ---> 0-dl.acm.org.columbus.uhu.es -
link.springer.com ---> 0-link.springer.com.columbus.uhu.es -
www.emeraldinsight.com/ ---> 0-www.emeraldinsight.com.columbus.uhu.es/(muy importante las barras o no funcionará)
- Inicie sesión para enviar comentarios
Propuestas de proyectos fin de máster e investigación
10 March, 2015 - 10:23 — Javier BarragánTengo algunas propuestas para la realización de proyectos fin de máster e investigación que creo son bastante interesantes. Cada uno de estos trabajos podría ser realizado por uno o dos alumnos.
Propuesta 1: Diseño e implementación de un controlador autónomo para la conducción de un superdeportivo en competición.
Propuesta 2: Propuesta 2: Diseño e implementación de un controlador para mantenimiento en pie y avance de un Lego Mindstorms NXT en configuración Segway.
Propuesta 3: Modelado y control del seguimiento de trayectorias de un vehículo cuatrirrotor.
Quienes estén interesados en la realización de alguno de estos proyectos, o en obtener más información sobre los mismos, puede pasarse por mi despacho en horario de tutorías.
Propuesta 1: Diseño e implementación de un controlador autónomo para la conducción de un superdeportivo en competición.
En este proyecto se pretende diseñar un controlador que permita la conducción autónoma de un vehículo de carreras, esto es, manejo automático de la dirección, aceleración, frenada y cambio de marchas. El diseño de los controladores necesarios puede realizarse mediante distintas técnicas en función de los conocimientos e intereses de los alumnos implicados en el proyecto (controladores lineales, no lineales o inteligentes).
![]()

La implementación se realizará en el simulador open source Torcs a partir de la interfaz cliente/servidor proporcionada por el Politecnico di Milano para el concurso anual Simulated Car Racing Championship. En el caso de que el resultado final obtenido fuese destacable, podría considerarse la participación del bot realizado en dicho concurso.
Propuesta 2: Diseño e implementación de un controlador para mantenimiento en pie y avance de un Lego Mindstorms NXT en configuración Segway
En este proyecto se pretende diseñar un controlador que mantenga en posición vertical un Lego Mindstorms en configuración Segway (péndulo invertido), y lo haga avanzar a lo largo de una pista de pruebas. Al igual que en la propuesta anterior, el diseño de los controladores necesarios puede realizarse mediante distintas técnicas en función de los conocimientos e intereses de los alumnos implicados en el proyecto (controladores lineales, no lineales o inteligentes).
La implementación del controlador diseñado se realizará en un robot que poseemos en el Grupo de Investigación de Control y Robótica montado según la normativa del Concurso Prodel de Control Inteligente. En el caso de que el resultado final obtenido fuese destacable, podría considerarse la participación del diseño realizado en dicho concurso.

Propuesta 3: Modelado y control del seguimiento de trayectorias de un vehículo cuatrirrotor.
En base a la propuesta del Concurso organizado anualmente por el Grupo CEA de Ingeniería de Control, se pretende realizar el modelado y control de un cuadricóptero Parrot AR Drone. Dada la complejidad de la planta, el modelo y diseño posterior del controlador en esta propuesta se recomienda que sea mediante alguna técnica de control inteligente (Redes Neuronales o Lógica Borrosa), aunque podría estudiarse la realización de controladores más sencillos para alumnos del Ingeniería Técnica Industrial o del Grado en Ingeniería Electrónica Industrial.
La implementación del controlador diseñado se realizará sobre el modelo obtenido en base a datos que se posee del cuadrirrotor y, en caso de ser satisfactoria, se implementaría físicamente en un AR Drone que poseemos en el Grupo de Investigación de Control y Robótica. En el caso de que el resultado final obtenido fuese destacable, podría considerarse la participación del diseño realizado en el concurso organizado por el Grupo CEA de Ingeniería de Control.

- Inicie sesión para enviar comentarios
Diseño y Control de Arquitecturas de Manipulación Paralelas e Híbridas
7 February, 2012 - 11:39 — Javier BarragánEl próximo miércoles día 8 de febrero, de 16:30 a 20:00 horas, el Dr. Carbone del LARM (Laboratorio de Robótica y Mecatrónica) de la Universidad de Cassino (Italia) impartirá en el Máster en Ingeniería de Control, Sistemas Electrónicos e Informática Industrial (aula 10 del pabellón Von Neumann) un mini-curso titulado Diseño y Control de Arquitecturas de Manipulación Paralelas e Híbridas. La asistencia es libre hasta completar el aforo, con preferencia para los alumnos matriculados en el máster.
El curso dará una visión general de los prototipos de manipuladores y robots paralelos que se han diseñado y construido en el LARM, centrando su atención en las técnicas para el diseño y control de los mismos. Se discutirán, las características de diseño y sus propiedades, haciendo especial énfasis en las ventajas que estas arquitecturas ofrecen frente a los tradicionales manipuladores serie. Particularmente, se mostrarán y se discutirá sobre los prototipos desarrollados en el LARM: CAPAMAN (Manipulador paralelo de la Universidad de Cassino), CAPAMAN 2, LARM EASY-LEG (robot bípedo), Manos del LARM 1 a 4 (manos robóticas), CASSINO hexápodo y CATRASYS (Sistema paralelo de cables para tareas de seguimiento).
Desarrollo del curso:
Conferencia 1: Manipuladores Paralelos e Híbridos
A) Introducción a las Arquitecturas paralelas y Híbridas:
- Estudio de los Manipuladores como cadenas cinemáticas.
- Cadenas cinemáticas cerradas.
- Arquitecturas paralelas.
- Manipuladores Híbridos.
B) Simulación Cinemática y Dinámica del los Manipuladores Paralelos e Híbridos.
- Modelos Cinemáticos y Dinámicos de manipuladores Paralelos e Híbridos.
- Herramientas para la simulación
- Ejemplos y casos de estudio .
Conferencia 2: Diseño y control de manipuladores Paralelos
A) Metodología de Diseño aplicada a los Prototipos desarrollados en el laboratorio LARM.
- Principios básico de diseño
- Modelos matemáticos para el diseño optimizado
- Ejemplos
B) Arquitectura y Software de Control
- Principios básico de control
- Modelos matemáticos
- Ejemplos
- Inicie sesión para enviar comentarios
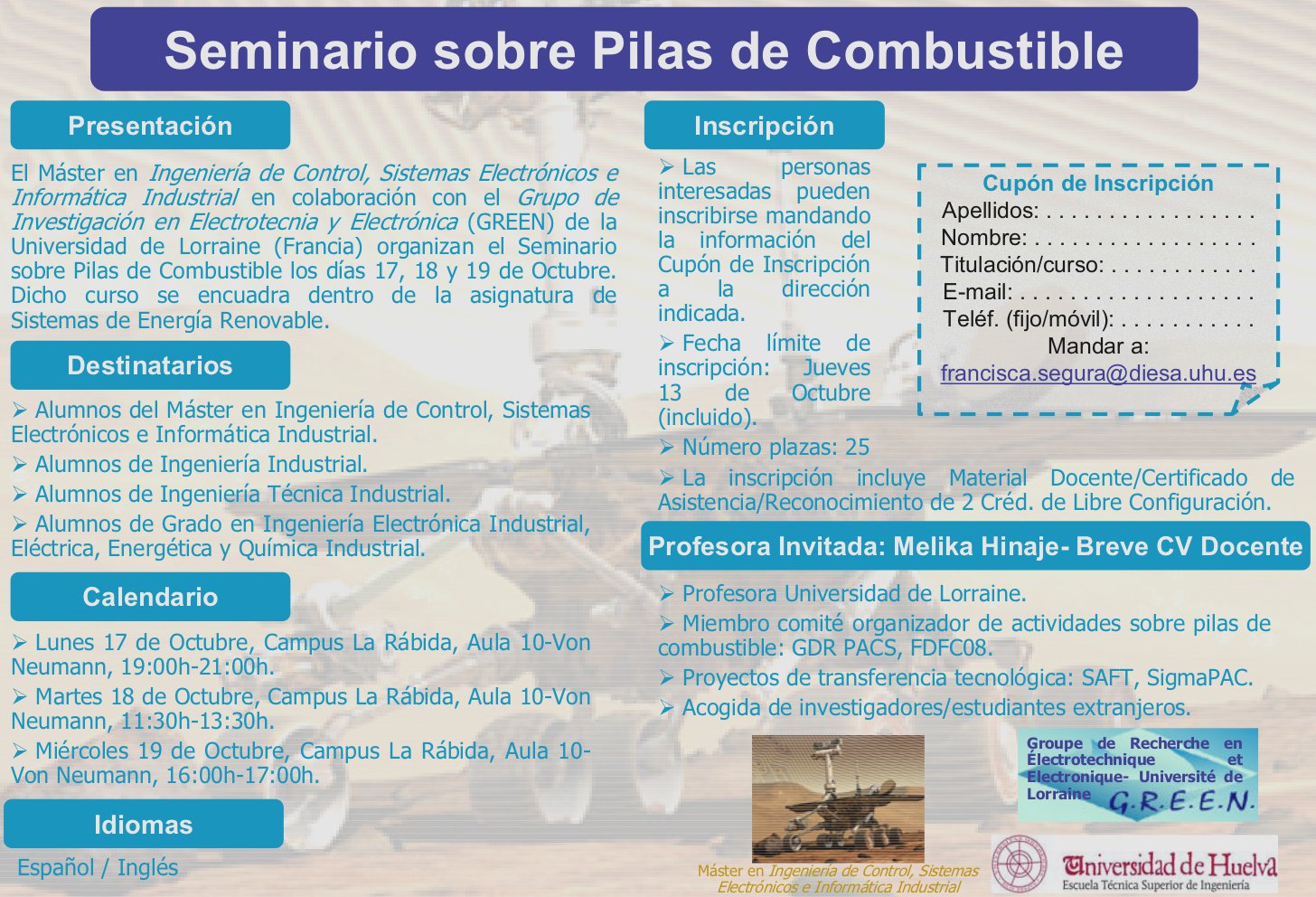
Seminario sobre "Pilas de Combustible"
11 October, 2011 - 09:28 — Javier BarragánLos próximos días 17, 18 y 19 de octubre tendrá lugar el seminario "Pilas de Combustible" impartido por la profesora Melika Hinake de la Universidad de Lorraine, y organizado por la compañera Francisca Segura dentro de la asignatura de Sistemas de Energía Renovable del Máster en Ingeniería de Control, Sistemas Electrónicos e Informática Industrial.
La asistencia será libre previa inscripción hasta completar un aforo de 25 personas. La inscripción incluye material docente, certificado de asistencia y reconocimiento de 2 créditos de libre configuración. Para resolver cualquier duda contactar con Francisca Segura en francisca.segura_arroba_diesia.uhu.es.
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()