

reconocimiento del fruto
Uno de los principales objetivos del proyecto ha sido el desarrollo de un sistema para localización de fresas maduras así como para el cálculo de su madurez. Este último parámetro determina la acción a realizar por el brazo recolector, desencadenando en su caso las acciones necesarias para la captura del fruto.
El algoritmo desarrollado de forma modular ejecuta una serie de acciones sobre la imagen capturadas que van desde el preprocesamiento y la segmentación hasta operaciones morfológicas para el refinamiento de los resultados.
El desarrollo inicial del algortimo ha sido llevado a cabo con la herramienta Matlab y posteriormente ha sido portado al firmware del sistema embebido de control del brazo.
En este punto el tiempo de ejecución es un factor determinante para la recolección en tiempo real y ajustada a la velocidad de desplazamiento del vehiculo autopropulsado de recolección. En diferentes condiciones de iluminación y densidad de frutos se obtienen velocidades de procesamiento de entre 10 y 20 imágenes por segundo, como resultado de cada una de estas imágenes se obtienen la posición, grado de madurez y otros parámetros geométricos de todos los frutos presentes en la escena.
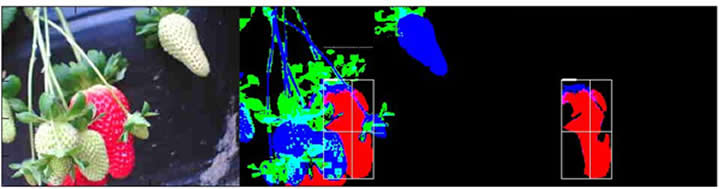
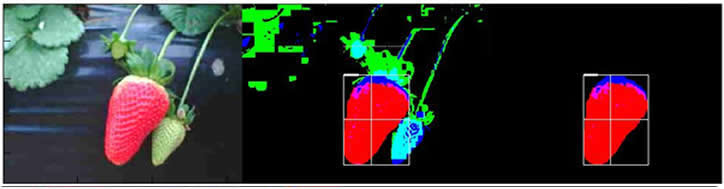
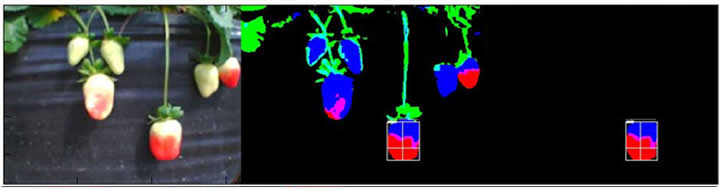
representaciÓN VISUAL DE LOS RESULTADOS DEL ALGORITMO
| Imagen Original | Imagen segmentada | Imagen final |
 |
||
 |
||
 |
||
| Leyenda: |  Zona madura Zona madura |
 Zona inmadura Zona inmadura |
 Verde vegetal Verde vegetal |