Modelado
Desde el punto de vista de la Automática, el modelo es la representación matemática de la planta a controlar, el cual permite analizar, describir, explicar y simular su comportamiento dinámico. Tanto por la descripción matemática utilizada como por la precisión considerada, una misma planta puede tener muchos modelos diferentes, todos igualmente válidos en su rango de consideración. En este capítulo se realizará una introducción al modelado de sistemas dinámicos (modelo dinámico) haciendo hincapié en las dos representaciones matemáticas de mayor interés en automática: modelado en ecuaciones diferenciales, de aplicación a los sistemas de tiempo continuo, y modelado en ecuaciones en diferencias, de aplicación a los sistemas discretos. A partir de estas dos representaciones se obtendrán los modelos de estado continuo y discreto, respectivamente, así como sus representaciones en forma de función de transferencia. Éstas últimas sólo aplicables a sistemas lineales y de una entrada – una salida.
En este capítulo, igual que en el resto del libro, se supondrá que el lector está familiarizado con MATLAB, no obstante, cuando se crea oportuno, se hará referencia a funciones específicas de MATLAB (en este tipo de letra) que resuelven operaciones concretas. Tecleando desde MATLAB el comando help seguido del nombre de la función, se obtiene en línea la informa-ción necesaria sobre la sintaxis y posibilidades de la función invocada.
La respuesta de un sistema dinámico a una acción sobre él no ocurre de forma inmediata. El dolor en el cuerpo no desaparece de forma inmediata al tomar un analgésico, sino que la respuesta lleva un tiempo. Tampoco sube de forma inmediata la temperatura en una habitación al encender la calefacción. En general la respuesta de un sistema dinámico a un estímulo lleva un tiempo, el cual depende de la naturaleza del estímulo y de la del sistema. El comportamiento temporal de un sistema ha de quedar reflejado en su modelo dinámico, el cual suele nacer a partir de la aplicación sobre él del conocimiento apropiado al sistema en cuestión: físico, económico, médico, etc.
Ejemplo 2.1. Sistema mecánico. Sea por ejemplo el sistema de la Figura 2.1 que representa un sistema muelle – masa – resorte, sujeto a sendos puntos fijos por ambos extremos. La variable  representa la posición de la masa m respecto de su posición de equilibrio
representa la posición de la masa m respecto de su posición de equilibrio  . Aplicando la segunda ley de Newton al sistema:
. Aplicando la segunda ley de Newton al sistema:
 |
(2.1) |
Esto es,
 |
(2.2) |
Donde ![\[\ddot y\left( t \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.1-3_0.png) representa, según la notación usual en mecánica, la derivada segunda de
representa, según la notación usual en mecánica, la derivada segunda de  respecto del tiempo (aceleración de la masa;
respecto del tiempo (aceleración de la masa;  sería la derivada primera, esto es, su velocidad);
sería la derivada primera, esto es, su velocidad);  es la fuerza externa aplicada (entrada al sistema);
es la fuerza externa aplicada (entrada al sistema); ![\[{f_k}\left( t \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.1-7.png) es la fuerza de reacción del muelle, la cual, si se asume por simplificar que el muelle cumple la ley de Hooke, está dada por
es la fuerza de reacción del muelle, la cual, si se asume por simplificar que el muelle cumple la ley de Hooke, está dada por  . Por último, asumiendo también que el elemento de fricción (amortiguador) se comporta linealmente, su oposición al desplazamiento es proporcional a la velocidad del movimiento,
. Por último, asumiendo también que el elemento de fricción (amortiguador) se comporta linealmente, su oposición al desplazamiento es proporcional a la velocidad del movimiento, ![\[{f_\beta }\left( t \right) = \beta \dot y\left( t \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.1-9.png) .
.
 |
| Figura 2.1. Sistema muelle – masa – amortiguador. |
El sistema de la Figura 2.1 se dice que es de segundo orden porque su dinámica depende de las dos primeras derivadas de . La ecuación diferencial (2.2) se denomina forzada o controlada porque el sistema está forzado o controlado por la entrada . Si no hubiera influencia externa en el sistema (la ecuación estaría igualada a cero,  ), éste (su ecuación) se denominaría no forzado o autónomo. Desde la perspectiva acción – reacción, la entrada del sistema es la fuerza aplicada y la salida el desplazamiento o respuesta . El sistema de la Figura 2.1 es lineal1 [1] debido a las simplificaciones realizadas (ni el muelle ni el amortiguador lo son realmente) y, además invariante con el tiempo (la respuesta ante una misma excitación es la misma para todo tiempo t), aunque realmente no es así. Por ejemplo, el comportamiento del muelle dependerá de la temperatura de su entorno. Lo mismo sucederá con el comportamiento del fluido que contenga el amortiguador. No obstante lo anterior, la mayoría de los sistemas, dentro de ciertas condiciones de funcionamiento, pueden ser considerados lineales e invariantes con el tiempo o, de manera abreviada LTI (del inglés Linear Time-Invariant).
), éste (su ecuación) se denominaría no forzado o autónomo. Desde la perspectiva acción – reacción, la entrada del sistema es la fuerza aplicada y la salida el desplazamiento o respuesta . El sistema de la Figura 2.1 es lineal1 [1] debido a las simplificaciones realizadas (ni el muelle ni el amortiguador lo son realmente) y, además invariante con el tiempo (la respuesta ante una misma excitación es la misma para todo tiempo t), aunque realmente no es así. Por ejemplo, el comportamiento del muelle dependerá de la temperatura de su entorno. Lo mismo sucederá con el comportamiento del fluido que contenga el amortiguador. No obstante lo anterior, la mayoría de los sistemas, dentro de ciertas condiciones de funcionamiento, pueden ser considerados lineales e invariantes con el tiempo o, de manera abreviada LTI (del inglés Linear Time-Invariant).
Cuando en 1683 Isaac Newton, para muchos el científico más grande que ha dado la historia2 [2], publicó los Philosophiae [3] Naturalis Principia Mathematica3 [3], el Cielo y la Tierra quedaron finalmente unificados en la Física, ya que demostró que las leyes naturales que gobiernan el movimiento en la Tierra y las que gobiernan el movimiento de los cuerpos celestes son las mismas4 [4]. Newton observó que el movimiento de los planetas podía ser predicho únicamente a partir de sus posiciones actuales y de sus velocidades. Esto es, no era necesario saber nada del movimiento pasado hasta el instante actual. Consecuentemente había definido el concepto de estado de un sistema dinámico (en este caso el sistema planetario) como el conjunto mínimo de variables (que denominaremos variables de estado) que permite determinar completamente su movimiento futuro. Este concepto será formalizado y generalizado en la sección siguiente.
El concepto de modelo de estado implica la representación del comportamiento dinámico de un sistema en base a un conjunto de ecuaciones diferenciales ordinarias (EDO) de primer orden, caracterizadas por la expresión siguiente:
![\[\frac{{d{\bf{x}}\left( t \right)}}{{dt}} = {\bf{f}}\left( {{\bf{x}}\left( t \right),{\bf{u}}\left( t \right)} \right)\,\,\,\,\,\,\,\,\,\,\,\,\,\]](/antonio.barragan/files/archivos_usuarios/78/form2.1-13%282.3%29.png) |
(2.3) |
Esta ecuación vectorial se denomina ecuación de estado. En ella  es el vector estado y sus coordenadas son las variables de estado (en el sistema mecánico de la Figura 2.1 sería un vector de 2 coordenadas: posición y velocidad). La variación del vector de estado respecto al tiempo se representa como una función vectorial, generalmente no lineal, cuyo argumento son los vectores de estado y de entrada5 [5]. El conjunto de todos los estados que puede alcanzar un sistema se denomina su espacio de estado. Puesto que cada estado estará caracterizado por un valor concreto de las variables de estado, el espacio de estado tiene por ejes coordenados las variables de estado. Así por ejemplo, dado el sistema mecánico anterior, cuyo estado está determinado por su posición y velocidad, el espacio de estado para el sistema de la Figura 2.1 será de 2 dimensiones, con una coordenada que repre-senta la posición del sistema y otra la velocidad .
es el vector estado y sus coordenadas son las variables de estado (en el sistema mecánico de la Figura 2.1 sería un vector de 2 coordenadas: posición y velocidad). La variación del vector de estado respecto al tiempo se representa como una función vectorial, generalmente no lineal, cuyo argumento son los vectores de estado y de entrada5 [5]. El conjunto de todos los estados que puede alcanzar un sistema se denomina su espacio de estado. Puesto que cada estado estará caracterizado por un valor concreto de las variables de estado, el espacio de estado tiene por ejes coordenados las variables de estado. Así por ejemplo, dado el sistema mecánico anterior, cuyo estado está determinado por su posición y velocidad, el espacio de estado para el sistema de la Figura 2.1 será de 2 dimensiones, con una coordenada que repre-senta la posición del sistema y otra la velocidad .
El modelo de estado se completa con la ecuación de salida (2.4), la cual representa generalmente el conjunto de variables que pueden ser medidas y que constituyen la respuesta del sistema. La ecuación de salida es una función vectorial del vector de estado y del vector de entrada.
 |
(2.4) |
A modo de ejemplo, y por fijar ideas, vamos a escribir el modelo de estado del sistema de la Figura 2.1. En él, como se ha dicho más arriba, una coordenada del vector de estado será la posición (sea pues  ) y la otra la velocidad (sea pues
) y la otra la velocidad (sea pues  ). Por supuesto el sistema es de orden 2, con lo cual la ecuación de estado en la forma (2.2) constará de dos ecuaciones diferenciales de primer orden, las cuales se obtienen a partir de sustituir las coordenadas del vector de estado en la ecuación (2.2). Esto es:
). Por supuesto el sistema es de orden 2, con lo cual la ecuación de estado en la forma (2.2) constará de dos ecuaciones diferenciales de primer orden, las cuales se obtienen a partir de sustituir las coordenadas del vector de estado en la ecuación (2.2). Esto es:
![\[m{\dot x_2}\left( t \right) + \beta {x_2}\left( t \right) + k{x_1}\left( t \right) = u\left( t \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.1-18%282.5%29.png) |
(2.5) |
Cabría preguntarse si se podría haberse sustituido  por
por  , en vez de por
, en vez de por  como se ha hecho, sin embargo esta sustitución no cumpliría la ecuación (2.3) que exige una sola coordenada derivada por ecuación.
como se ha hecho, sin embargo esta sustitución no cumpliría la ecuación (2.3) que exige una sola coordenada derivada por ecuación.
A partir de (2.5) basta con despejar la coordenada derivada del vector de estado ( ) y tener en cuenta que
) y tener en cuenta que  , de modo que la ecuación de estado del sistema de la Figura 2.1 en la forma
, de modo que la ecuación de estado del sistema de la Figura 2.1 en la forma  será:
será:
 |
(2.6) |
Nótese que la entrada u(t) al sistema es un escalar en este caso. El modelo de estado se completa con la ecuación de salida en la forma (2.4), que en este caso estará dada por 
Al ser el modelo de estado lineal6 [6], éste, a partir de la ecuación (2.5) y la de salida, admite una representación matricial de la forma:
 |
(2.7) |
Donde A es una matriz de orden ![\[n \times n\]](/antonio.barragan/files/archivos_usuarios/78/form2.1-28.png) , siendo n la dimensión del espacio de estado u orden del sistema (2 en el ejemplo). B es una matriz de orden
, siendo n la dimensión del espacio de estado u orden del sistema (2 en el ejemplo). B es una matriz de orden ![\[n \times p\]](/antonio.barragan/files/archivos_usuarios/78/form2.1-29.png) , siendo p el número de entradas del sistema, 1 en este caso. Respecto de la ecuación de salida, C es una matriz de orden
, siendo p el número de entradas del sistema, 1 en este caso. Respecto de la ecuación de salida, C es una matriz de orden ![\[q \times n\]](/antonio.barragan/files/archivos_usuarios/78/form2.1-30.png) , siendo m las salidas del sistema (1 en el ejemplo). Por último, la matriz D (0 en este caso) es de orden
, siendo m las salidas del sistema (1 en el ejemplo). Por último, la matriz D (0 en este caso) es de orden ![\[q \times p\]](/antonio.barragan/files/archivos_usuarios/78/form2.1-31.png) . Normalmente los modelos de estado no tienen matriz D, lo cual indica que, como suele ser habitual, la entrada no influencia de modo directo a la salida.
. Normalmente los modelos de estado no tienen matriz D, lo cual indica que, como suele ser habitual, la entrada no influencia de modo directo a la salida.
A continuación se van a formalizar los conceptos introducidos en la sección anterior. Esto se hará para el dominio de tiempo continuo (ecuaciones diferenciales); para el dominio de tiempo discreto (ecuaciones en diferencias) se realizará en la sección 2.5.
Tiempo continuo
El estado de un sistema es una colección de variables, denominadas variables de estado, que reúnen la información suficiente sobre el pasado del mismo, de tal manera que su conocimiento en el instante actual  junto con el de la entrada para el momento presente y futuro
junto con el de la entrada para el momento presente y futuro  , permite determinar el comportamiento del sistema para cualquier
, permite determinar el comportamiento del sistema para cualquier  .
.
Las variables de estado componen un vector ![\[{\mathbf{x}}\left( t \right) \in {\mathbb{R}^n}\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-35.png) denominado vector de estado. Las variables de control (o de entrada) forman el vector de entrada
denominado vector de estado. Las variables de control (o de entrada) forman el vector de entrada ![\[{\mathbf{u}}\left( t \right) \in {\mathbb{R}^p}\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-36.png) , y las señales medidas (respuestas) constituyen el vector de salida
, y las señales medidas (respuestas) constituyen el vector de salida  . A partir de aquí, un sistema dinámico invariante con el tiempo7 [7] puede ser representado por las ecuaciones:
. A partir de aquí, un sistema dinámico invariante con el tiempo7 [7] puede ser representado por las ecuaciones:
 |
(2.8) |
Donde ![\[{\raise0.7ex\hbox{${d{\mathbf{x}}}$} \!\mathord{\left/ {\vphantom {{d{\mathbf{x}}} {dt}}}\right.\kern-\nulldelimiterspace} \!\lower0.7ex\hbox{${dt}$}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-40.png) representa un conjunto de n ecuaciones diferenciales ordinarias.
representa un conjunto de n ecuaciones diferenciales ordinarias.  y
y  son funciones vectoriales generalmente no lineales. Un modelo de la forma (2.8) se denomina modelo de estado. A esta forma de representar un sistema dinámico se le denomina representación interna, ya que las coordenadas de vector de estado son variables que en todo o en parte no estarán presentes en los terminales de salida del sistema.
son funciones vectoriales generalmente no lineales. Un modelo de la forma (2.8) se denomina modelo de estado. A esta forma de representar un sistema dinámico se le denomina representación interna, ya que las coordenadas de vector de estado son variables que en todo o en parte no estarán presentes en los terminales de salida del sistema.
La dimensión del vector de estado viene dada por el orden del sistema. El sistema (2.8) se denomina invariante con el tiempo porque las funciones f y h no dependen explícitamente del tiempo. Por supuesto, hay modelos más generales donde esta dependencia explícita sí se da. Como se puede apreciar en la ecuación (2.8), el modelo de estado consta de dos funciones: la función f da la variación temporal del vector de estado como una función del estado y la ley de control , y la función h da los valores medidos como una función del estado y la ley de control .
Un modelo de estado se denomina lineal si las funciones f y h son lineales en y Esto permite escribir el modelo (2.8) en la forma:
 |
(2.9) |
Donde A, B, C y D son matrices constantes. La matriz A se denomina matriz de estado o matriz dinámica (de dimensión  ), la matriz B se denomina matriz de entrada o matriz de control (de dimensión
), la matriz B se denomina matriz de entrada o matriz de control (de dimensión  ), la matriz C se denomina matriz de salida o matriz sensora (de dimensión
), la matriz C se denomina matriz de salida o matriz sensora (de dimensión  ), y la matriz D se denomina matriz de transferencia directa o simplemente término directo (de dimensión
), y la matriz D se denomina matriz de transferencia directa o simplemente término directo (de dimensión  ).
).
Como se ha visto, el modelo de estado se obtiene a partir de la ecuación diferencial que captura la dinámica del sistema. En consecuencia, dependiendo de la forma que tenga la ecuación dife-rencial se pueden obtener modelos de estado diferentes, los cuales, una vez conocida la metodo-logía, pueden ser obtenidos de forma directa a partir de la ecuación diferencial de partida.
Sea por ejemplo un sistema de orden n en el que la señal de control no contiene términos deri-vados:
|
o en notación abreviada: |
(2.10) |
Si se define
![${\bf{x}}\left( t \right)\,\, = {\left[ {{x_1}\left( t \right)\,\,{x_2}\left( t \right) \ldots \,{x_n}\left( t \right)} \right]^{\rm{T}}} = \left[ {y\left( t \right)\,\,\dot y\left( t \right) \ldots {y^{\left( {n - 1} \right)}}\left( t \right)} \right]{\,^{\rm{T}}}\,\,\,\,\,\,\,$](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-48%282.11%29.png) |
(2.11) |
Entonces, la ecuación (2.10) puede ser escrita como
 |
(2.12) |
O bien en la forma 
 |
(2.13) |
Por último, la ecuación de salida se escribirá:
 |
(2.14) |
La forma de elección de variables de estado que da lugar al modelo representado en (2.13) y (2.14) se denomina forma canónica de cadena de integradores, o forma canónica de control. Existen muchas más formas de obtener representaciones en el espacio de estado de los sistemas. Algu-nas de ellas se irán viendo conforme sea apropiado a lo largo del texto.
Con objeto de fijar ideas vamos a realizar ahora varios ejercicios de modelado de sistemas di-námicos de diferente índole.
Ejemplo 2.2. Propagación de una enfermedad epidémica. La propagación de una enfermedad epidémica puede ser descrita mediante un conjunto de ecuaciones diferenciales de primer orden. Asúmase que el vector población de estudio tiene 3 coordenadas: población en riesgo de ser infectada  población infectada
población infectada  y población que no va a ser infectada
y población que no va a ser infectada  Este último grupo reúne a las personas que son inmunes a la enfermedad, las que ya han fallecido y las que han conseguido ser aisladas para evitar contagios.
Este último grupo reúne a las personas que son inmunes a la enfermedad, las que ya han fallecido y las que han conseguido ser aisladas para evitar contagios.
Si se asume en primera instancia que la población está aislada y el número de individuos es N, está claro que para todo t se cumplirá que  Con objeto de elaborar el modelo dinámico razonaremos del modo siguiente: a partir de un instante de tiempo t en el que el número de infectados es
Con objeto de elaborar el modelo dinámico razonaremos del modo siguiente: a partir de un instante de tiempo t en el que el número de infectados es  el número de casos nuevos ocurridos en el intervalo
el número de casos nuevos ocurridos en el intervalo ![$\left[ {t,\,\,t + \Delta t} \right]$](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-57.png) será
será  por tanto, la evolución de cada una de las tres poblaciones será:
por tanto, la evolución de cada una de las tres poblaciones será:
![\[\begin{array}{l} {x_1}\left( {t + \Delta t} \right) = {x_1}\left( t \right) - \left\{ {{\rm{Excluidos hacia}}\,\,{x_3}} \right\} - \left\{ {{\rm{Excluidos hacia}}\,\,{x_2}} \right\} \\ {x_2}\left( {t + \Delta t} \right) = {x_2}\left( t \right) + \left\{ {{\rm{Contagiados desde}}\,\,{x_1}} \right\} - \left\{ {{\rm{Excluidos hacia}}\,\,{x_3}} \right\} \\ {x_3}\left( {t + \Delta t} \right) = {x_3}\left( t \right) + \left\{ {{\rm{Excluidos desde}}\,\,{x_1}} \right\} + \left\{ {{\rm{Excluidos desde}}\,\,{x_2}} \right\} \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-59%282.15%29.png) |
(2.15) |
Esto es,
![\[\begin{array}{l} {x_1}\left( {t + \Delta t} \right) = {x_1}\left( t \right) - \alpha {x_1}\left( t \right)\Delta t - \beta {x_2}\left( t \right)\Delta t \\ {x_2}\left( {t + \Delta t} \right) = {x_2}\left( t \right) + \lambda {x_1}\left( t \right)\Delta t - \gamma {x_2}\left( t \right)\Delta t \\ {x_3}\left( {t + \Delta t} \right) = {x_3}\left( t \right) + \alpha {x_1}\left( t \right)\Delta t + \gamma {x_2}\left( t \right)\Delta t \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-60%282.16%29.png) |
(2.16) |
Donde los parámetros ![\[\alpha ,\,\beta ,\,\lambda \,\,{\rm{y}}\,\,\gamma \]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-61.png) son tasas, y obviamente,
son tasas, y obviamente, ![\[\lambda {x_1}\left( t \right)\Delta t = \beta {x_2}\left( t \right)\Delta t.\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-62.png) A partir de aquí, teniendo en cuenta que:
A partir de aquí, teniendo en cuenta que:
![\[{\dot x_i}\left( t \right) = \mathop {\lim }\limits_{\Delta t \to 0} \frac{{{x_i}\left( {t + \Delta t} \right) - {x_i}\left( t \right)}}{{\Delta t}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-63%282.17%29.png) |
(2.17) |
Podemos escribir el modelo de estado del sistema que representa la propagación de la epidemia como
![\[\left. \begin{array}{l} {{\dot x}_1}\left( t \right) = - \alpha {x_1}\left( t \right) - \beta {x_2}\left( t \right) \\ {{\dot x}_2}\left( t \right) = \lambda {x_1}\left( t \right) - \gamma {x_2}\left( t \right) \\ {{\dot x}_3}\left( t \right) = \alpha {x_1}\left( t \right) + \gamma {x_2}\left( t \right) \\ \end{array} \right\} \Rightarrow \left( {\begin{array}{*{20}{c}} {{{\dot x}_1}\left( t \right)} \\ {{{\dot x}_2}\left( t \right)} \\ {{{\dot x}_3}\left( t \right)} \\ \end{array}} \right) = \left( {\begin{array}{*{20}{c}} \hfill { - \alpha } & \hfill { - \beta } & \hfill 0 \\ \hfill \lambda & \hfill { - \gamma } & \hfill 0 \\ \hfill \alpha & \hfill \gamma & \hfill 0 \\ \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)} \\ {{x_2}\left( t \right)} \\ {{x_3}\left( t \right)} \\ \end{array}} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-64%282.18%29.png) |
(2.18) |
Si consideramos ahora que el sistema no está aislado, de modo que  es la velocidad con la que se incorporan nuevos individuos a la población con riesgo, y
es la velocidad con la que se incorporan nuevos individuos a la población con riesgo, y  la velocidad con la que se añaden nuevos individuos a la población infectada, la ecuación (2.18) se escribirá en la forma:
la velocidad con la que se añaden nuevos individuos a la población infectada, la ecuación (2.18) se escribirá en la forma:
![\[\left. \begin{array}{l} {{\dot x}_1}\left( t \right) = - \alpha {x_1}\left( t \right) - \beta {x_2}\left( t \right) + {u_1}\left( t \right) \\ {{\dot x}_2}\left( t \right) = \lambda {x_1}\left( t \right) - \gamma {x_2}\left( t \right) + {u_2}\left( t \right) \\ {{\dot x}_3}\left( t \right) = \alpha {x_1}\left( t \right) + \gamma {x_2}\left( t \right) \\ \end{array} \right\} \Rightarrow \left( {\begin{array}{*{20}{c}} {{{\dot x}_1}\left( t \right)} \\ {{{\dot x}_2}\left( t \right)} \\ {{{\dot x}_3}\left( t \right)} \\ \end{array}} \right) = \left( {\begin{array}{*{20}{c}} \hfill { - \alpha } & \hfill { - \beta } & \hfill 0 \\ \hfill \lambda & \hfill { - \gamma } & \hfill 0 \\ \hfill \alpha & \hfill \gamma & \hfill 0 \\ \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)} \\ {{x_2}\left( t \right)} \\ {{x_3}\left( t \right)} \\ \end{array}} \right) + \left( {\begin{array}{*{20}{c}} \hfill 1 & \hfill 0 \\ \hfill 0 & \hfill 1 \\ \hfill 0 & \hfill 0 \\ \end{array}} \right) + \left( {\begin{array}{*{20}{c}} {{u_1}\left( t \right)} \\ {{u_2}\left( t \right)} \\ \end{array}} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-67%282.19%29.png) |
(2.19) |
Nótese que los modelos (2.18) y (2.19) son simples en el sentido que son lineales, ya que no in-cluyen la interacción entre los grupos  . Volveremos con esto más adelante, en el ejemplo 2.13.
. Volveremos con esto más adelante, en el ejemplo 2.13.
 |
| Figura 2.2. Sistema péndulo. |
Ejemplo 2.3. Sistema péndulo. Considere el péndulo simple de la Figura 2.2, el cual está sujeto por una cuerda inextensible de longitud l y masa despreciable. El péndulo está sometido a la fuerza gravitacional mg debida a su peso, y a la fuerza de fricción  , la cual se asume que es proporcional a la velocidad con un coeficiente de fricción k. La aplicación de la segunda ley de Newton (expresión (2.1)) permite escribir la ecuación del movimiento en la dirección tangencial:
, la cual se asume que es proporcional a la velocidad con un coeficiente de fricción k. La aplicación de la segunda ley de Newton (expresión (2.1)) permite escribir la ecuación del movimiento en la dirección tangencial:
 |
(2.20) |
Como se sabe, siempre que sea posible hay que intentar elegir un eje coordenado que sea paralelo a la aceleración. En este caso, la escritura del movimiento en la dirección tangencial tiene la ventaja que la tensión en la cuerda, la cual es normal, no aparece en la ecuación. Para obtener el modelo de estado del péndulo tomaremos como siempre las coordenadas posición y velocidad para el vector de estado, esto es,  y
y  . Entonces, el modelo de estado es:
. Entonces, el modelo de estado es:
![\[\begin{array}{*{20}{c}} {{{\dot x}_1}\left( t \right) = {x_2}\left( t \right)} \\ {{{\dot x}_2}\left( t \right) = - \frac{g}{l}{\rm{sen}}{x_1}\left( t \right) - \frac{k}{m}{x_2}\left( t \right)} \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-74%282.21%29.png) |
(2.21) |
Nótese el carácter no lineal del modelo de estado que, consecuentemente, no admite escritura en forma matricial.
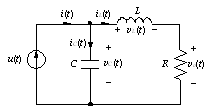 |
| Figura 2.3. Circuito RLC con fuente de corriente. |
Ejemplo 2.4. Circuito RLC. Veamos ahora un sistema eléctrico. Sea pues el circuito RLC de la Figura 2.3. Si en los modelos de estado de los sistemas mecánicos las variables de estado a con-siderar son la posición y velocidad, en los circuitos eléctricos interesa considerar la corriente y/o tensión en los elementos almacenadores de energía. Entonces, asumiendo que el condensador e inductor son elementos ideales, sus modelos de circuito están dados, respectivamente, por  Sea pues
Sea pues  La entrada del sistema es la fuente de corriente y la salida la tensión en la carga
La entrada del sistema es la fuente de corriente y la salida la tensión en la carga  Según lo anterior, el modelo de estado puede ser planteado del modo siguiente:
Según lo anterior, el modelo de estado puede ser planteado del modo siguiente:
 |
(2.22) |
Ahora, aplicando las leyes de Kirchhoff de corriente y tensión se establecen las relaciones que permiten escribir (2.22) en la forma  Así, aplicando la ley de Kirchhoff de co-rriente en el nudo superior de la Figura 2.3 se tiene que:
Así, aplicando la ley de Kirchhoff de co-rriente en el nudo superior de la Figura 2.3 se tiene que:
 |
(2.23) |
Esto es,
 |
(2.24) |
La expresión anterior permite completar la primera ecuación de estado de (2.22). Respecto de la segunda, ésta se completa aplicando la ley de Kirchhoff de tensiones al lazo RLC. En él se cumple que
 |
(2.25) |
Esto es,
 |
(2.26) |
Sustituyendo (2.24) y (2.26) en la ecuación de estado (2.22) se tiene que
![\[\begin{array}{*{20}{c}} {{{\dot x}_1}\left( t \right) = - \frac{1}{C}{x_2}\left( t \right) + \frac{1}{C}u\left( t \right)} \\ {{{\dot x}_2}\left( t \right) = \frac{1}{L}{x_1}\left( t \right) - \frac{R}{L}{x_2}\left( t \right)} \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-85%282.27%29.png) |
(2.27) |
Respecto de la ecuación de salida está dada por
 |
(2.28) |
El conjunto de ecuaciones (2.27) y (2.28) permite escribir el modelo de estado del circuito del modo siguiente:
![\[\left. {\begin{array}{*{20}{c}} {{\bf{\dot x}}\left( t \right) = {\bf{Ax}}\left( t \right) + {\bf{B}}u\left( t \right)} \\ {y\left( t \right) = {\bf{Cx}}\left( t \right)} \\ \end{array}} \right\} \Rightarrow \left\{ {\begin{array}{*{20}{c}} {\left( {\begin{array}{*{20}{c}} {{{\dot x}_1}\left( t \right)} \\ {{{\dot x}_2}\left( t \right)} \\ \end{array}} \right) = \left( {\begin{array}{*{20}{c}} 0 & { - \frac{1}{C}} \\ {\frac{1}{L}} & { - \frac{R}{L}} \\ \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)} \\ {{x_2}\left( t \right)} \\ \end{array}} \right) + \left( {\begin{array}{*{20}{c}} {\frac{1}{C}} \\ 0 \\ \end{array}} \right)u\left( t \right)} \\ {y\left( t \right) = \left( {\begin{array}{*{20}{c}} 0 & R \\ \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)} \\ {{x_2}\left( t \right)} \\ \end{array}} \right)} \\ \end{array}} \right.\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-87%282.29%29.png) |
(2.29) |
Es importante tener muy presente los conceptos lineal y no lineal. La consideración de lineal para un modelo y las expresiones matemáticas que lo definen facilita mucho su manejo y comprensión. Sin embargo, teniendo en cuenta que, en general, los sistemas reales son no lineales, el grado de aproximación que se requiere para convertir un sistema no lineal en lineal siempre ha de ser tenido en cuenta. Como muestra, cuando en el ejemplo 2.1 se asume que el comportamiento del muelle es lineal, debemos tener en cuenta que esto exige, para que el modelo tenga suficiente precisión, que los esfuerzos aplicados sobre el muelle sean pequeños, lo cual ya nos está indicando que el modelo lineal deducido en el ejemplo no es válido para cualquier condición de funcionamiento.
 |
| Figura 2.4. Linealización a tramos |
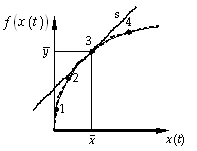
Linealizar un sistema no lineal es una técnica habitual que ayuda mucho en el análisis de los sistemas no lineales, sin embargo, nunca hay que perder de vista el ámbito de validez del modelo lineal y el error que se comete. Véase por ejemplo la Figura 2.4, donde la función no lineal  ha sido linealizada a tramos en el entorno de diferentes puntos de operación (1 a 4). Esto se ha hecho así porque el error que se comete es mucho menor que si se linealiza la función en un solo tramo para todo el dominio de interés (segmento s). Dicho esto, hay que tener en cuenta ahora que la función no lineal
ha sido linealizada a tramos en el entorno de diferentes puntos de operación (1 a 4). Esto se ha hecho así porque el error que se comete es mucho menor que si se linealiza la función en un solo tramo para todo el dominio de interés (segmento s). Dicho esto, hay que tener en cuenta ahora que la función no lineal  podrá ser aproximada mediante 4 expresiones linealizadas, cada una de las cuales sólo será válida en su dominio correspondiente (entorno de los puntos 1 a 4); por tanto, dependiendo del tramo de operación, el modelo lineal a aplicar deberá ser el apropiado, ya que en caso contrario los errores cometidos podrían hacer inoperativo el modelo. Así por ejemplo, si el sistema no lineal va a trabajar en torno a un punto de operación (supongamos
podrá ser aproximada mediante 4 expresiones linealizadas, cada una de las cuales sólo será válida en su dominio correspondiente (entorno de los puntos 1 a 4); por tanto, dependiendo del tramo de operación, el modelo lineal a aplicar deberá ser el apropiado, ya que en caso contrario los errores cometidos podrían hacer inoperativo el modelo. Así por ejemplo, si el sistema no lineal va a trabajar en torno a un punto de operación (supongamos  punto 3 de la Figura 2.4) con pequeños desplazamientos alrededor de él, el modelo lineal a utilizar será el que describe dicho entorno, no siendo necesarios el resto de modelos por ser puntos de operación en los que no se va a encontrar el sistema.
punto 3 de la Figura 2.4) con pequeños desplazamientos alrededor de él, el modelo lineal a utilizar será el que describe dicho entorno, no siendo necesarios el resto de modelos por ser puntos de operación en los que no se va a encontrar el sistema.
Una técnica habitual de linealización de funciones no lineales consiste en realizar un desarrollo en serie de Taylor de la expresión no lineal alrededor de un punto de operación concreto. Así por ejemplo, si como en la Figura 2.4 se considera que el punto de operación normal es la ecuación no lineal  puede ser desarrollada alrededor de ese punto del modo siguiente:
puede ser desarrollada alrededor de ese punto del modo siguiente:
 |
(2.30) |
Si la variación  es pequeña (validez de la aproximación de la curva mediante el segmento), los términos de orden superior en pueden ser obviados, con lo cual la ecuación (2.30) puede ser escrita abreviadamente como
es pequeña (validez de la aproximación de la curva mediante el segmento), los términos de orden superior en pueden ser obviados, con lo cual la ecuación (2.30) puede ser escrita abreviadamente como
![\[y\left( t \right) \simeq f\left( {\bar x} \right) + K\left( {x\left( t \right) - \bar x} \right);{\rm{ donde }}K = {\left. {\frac{{df}}{{dx\left( t \right)}}} \right|_{x\left( t \right) = \bar x}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.2-5%282.31%29.png) |
(2.31) |
Esto es, puesto que  , la ecuación (2.31) puede ser escrita como
, la ecuación (2.31) puede ser escrita como
 |
(2.32) |
Lo cual indica que  es sensiblemente proporcional a ; esto es, (2.32) es un modelo lineal aproximado de
es sensiblemente proporcional a ; esto es, (2.32) es un modelo lineal aproximado de  válido en el entorno
válido en el entorno  del punto de operación.
del punto de operación.
Si f es una función de varias variables, supongamos dos por ejemplo8 [8], el desarrollo en serie de Taylor de  se escribiría, en el entorno de un punto de interés
se escribiría, en el entorno de un punto de interés  como
como
![\[\begin{array}{*{20}{c}} {y\left( t \right) \cong f\left( {{x_1}\left( t \right),{x_2}\left( t \right)} \right) = f\left( {{{\bar x}_1},{{\bar x}_2}} \right) + \left[ {{{\left. {\frac{{\partial f}}{{\partial {x_1}\left( t \right)}}} \right|}_p}\left( {{x_1}\left( t \right) - {{\bar x}_1}} \right) + {{\left. {\frac{{\partial f}}{{\partial {x_2}\left( t \right)}}} \right|}_p}\left( {{x_2}\left( t \right) - {{\bar x}_2}} \right)} \right]} \hfill \\ { + \frac{1}{{2{\rm{!}}}}\left[ {{{\left. {\frac{{{\partial ^2}f}}{{\partial {x_1}^2\left( t \right)}}} \right|}_p}{{\left( {{x_1}\left( t \right) - {{\bar x}_1}} \right)}^2} + 2{{\left. {\frac{{{\partial ^2}f}}{{\partial {x_1}\left( t \right)\partial {x_2}\left( t \right)}}} \right|}_p}\left( {{x_1}\left( t \right) - {{\bar x}_1}} \right)\left( {{x_2}\left( t \right) - {{\bar x}_2}} \right) + {{\left. {\frac{{{\partial ^2}f}}{{\partial {x_2}^2\left( t \right)}}} \right|}_p}{{\left( {{x_2}\left( t \right) - {{\bar x}_2}} \right)}^2}} \right] + \cdots } \hfill \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.2-14%282.33%29.png) |
(2.33) |
Nuevamente, puesto que  , la ecuación (2.33) puede ser escrita, despreciando los términos de orden superior, como un modelo matemático lineal válido alrededor del punto de operación p:
, la ecuación (2.33) puede ser escrita, despreciando los términos de orden superior, como un modelo matemático lineal válido alrededor del punto de operación p:
 |
(2.34) |
Ejemplo 2.5. Linealización de un modelo no lineal. Sea la ecuación no lineal ![\[y = f\left( {{x_1},{x_2}} \right) = {x_1}{x_2}\]](/antonio.barragan/files/archivos_usuarios/78/form2.2-17.png) . Se trata de linealizarla en la región
. Se trata de linealizarla en la región ![\[4 \le {x_1} \le 8{\rm{ y }}9 \le {x_2} \le 13.\]](/antonio.barragan/files/archivos_usuarios/78/form2.2-18.png) El punto lógico de operación para realizar la linealización es el medio en ambas regiones, esto es:
El punto lógico de operación para realizar la linealización es el medio en ambas regiones, esto es: ![\[{\bar x_1} = 6{\rm{ y }}{\bar x_2} = 11.\]](/antonio.barragan/files/archivos_usuarios/78/form2.2-19.png) Aplicando (2.34) se tiene que
Aplicando (2.34) se tiene que
 |
(2.35) |
La ecuación linealizada es pues
 |
(2.36) |
Donde  La ecuación (2.36) puede ser escrita también como
La ecuación (2.36) puede ser escrita también como
 |
(2.37) |
Para  por ejemplo, el valor verdadero de y es
por ejemplo, el valor verdadero de y es  . El valor linealizado se obtiene de (2.37) y vale
. El valor linealizado se obtiene de (2.37) y vale  . Por tanto, en este punto el error cometido es de
. Por tanto, en este punto el error cometido es de  . En el otro extremo,
. En el otro extremo,  ,con lo cual el valor real de y es
,con lo cual el valor real de y es  , y el aproximado
, y el aproximado  . Aquí el error es menor que en el otro extremo:
. Aquí el error es menor que en el otro extremo:  .
.
En ingeniería de control es de gran interés la linealización de la ecuación de estado, ya que ello permite linealizar en torno a un punto el modelo de un sistema no lineal. La ecuación de estado, como se sabe, es una función vectorial de varias variables, lo cual hace que su procedimiento de linealización sea un poco más complejo que el visto en esta sección. Trataremos esta cuestión con detalle en la sección 3.8 del capítulo siguiente.
 |
| Figura 2.5. Sistema de una entrada – una salida (SISO). |
La función de transferencia de un sistema lineal e invariante en el tiempo se define como la relación entre la transformada de Laplace9 [9] de la variable de salida y la transformada de Laplace de la variable de entrada, suponiendo que todas las condiciones iniciales se hacen iguales a cero. Esta forma de representar sistemas se denomina representación externa, ya que atiende a las señales presentes en sus terminales de entrada y salida. Así, dado el sistema de la Figura 2.5, su función de transferencia será:
![$G\left( s \right) = {\left. {\frac{{L\left[ {y\left( t \right)} \right]}}{{L\left[ {u\left( t \right)} \right]}}} \right|_{\scriptstyle {\rm{Cond}}{\rm{.}}\,{\rm{iniciales}} \hfill \atop \scriptstyle {\rm{nulas}} \hfill}} = \frac{{Y\left( s \right)}}{{U\left( s \right)}}$](/antonio.barragan/files/archivos_usuarios/78/form2.3-4%282.38%29.png) |
(2.38) |
 |
| Figura 2.6. Esquema conceptual del proceso de resolución de una ecuación diferencial mediante la transformada de Laplace. |
Tradicionalmente la transformada de Laplace ha sido muy usada en sistemas de control y aún hoy día todavía lo es, sin embargo, restringe mucho el campo de aplicación, ya que sólo es apropiada para estudiar sistemas lineales y, dentro de éstos, los de una entrada-una salida o SISO (del inglés Single Imput-Single Output). Para el caso de sistemas lineales MIMO (del inglés Multiple Imputs-Multiple Outputs), habrá tantas funciones de transferencia como relaciones salida/entrada puedan ser obtenidas. Así por ejemplo, un sistema lineal con dos entradas y dos salidas generará 4 funciones de transferencia: Y1(s)/U1(s), Y1(s)/U2(s), Y2(s)/U1(s), e Y2(s)/U2(s). Evidentemente, la clave para poder hacer esta separación entrada/salida es la imposición de linealidad del sistema, la cual permite obtener la respuesta total como la suma de las respuestas individuales entre cada entrada y salida.
A continuación, con objeto de fijar ideas y familiarizar al lector no avezado en el uso operacional de la transformada de Laplace, vamos a realizar un par de ejemplos donde se pone de manifiesto su utilidad. Las ocasiones en las que se use la transformada de Laplace en el texto se hará siempre como herramienta, por tanto, se recomienda el manejo de otros libros para profundizar en este instrumento matemático.
Ejemplo 2.6. Resolución de una ecuación diferencial lineal ordinaria. La transformada de Laplace facilita de forma notable la resolución de ecuaciones diferenciales lineales, ya que convierte la ecuación diferencial temporal en un polinomio en s, y el proceso de integración para resolverla, en una manipulación algebraica de un polinomio cuya conversión al dominio temporal es inmediata mediante tablas. El proceso descrito se ilustra en la Figura 2.6. Para realizar la transformación desde el dominio de la variable compleja s al dominio temporal se emplea una integral de inversión denominada transformada inversa10 [10] de Laplace,  .
.
En la práctica, rara vez se emplea la integral de inversión para encontrar f(t). Hay un método más sencillo que vamos a ilustrar en este ejemplo, que consiste en descomponer la expresión en s resultante de la transformación en fracciones simples, para después, mediante tablas, realizar una traslación directa al dominio temporal. Sea pues la ecuación diferencial a resolver siguiente:
 |
(2.39) |
Aplicando la transformada de Laplace11 [11] a cada término de la ecuación:
![\[L\left[ {\frac{{{d^2}y\left( t \right)}}{{d{t^2}}}} \right] + 5L\left[ {\frac{{dy\left( t \right)}}{{dt}}} \right] + 6L\left[ {y\left( t \right)} \right] = 4L\left[ {u\left( t \right)} \right]\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-10%282.40%29.png) |
(2.40) |
Utilizando una tabla de transformadas se escribe la correspondiente a cada sumando:
![\[{s^2}Y\left( s \right) - sy\left( 0 \right) - \frac{{dy\left( 0 \right)}}{{dt}} + 5\left[ {sY\left( s \right) - y\left( 0 \right)} \right] + 6Y\left( s \right) = 4U\left( s \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-11%282.41%29.png) |
(2.41) |
Ahora, teniendo en cuenta las condiciones iniciales y que la transformada de la señal escalón unitario U(s) es 1/s,
![\[{s^2}Y\left( s \right) - s + 5\left[ {sY\left( s \right) - 1} \right] + 6Y\left( s \right) = \frac{4}{s}\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-12%282.42%29.png) |
(2.42) |
Agrupando términos y despejando Y(s),
![\[Y\left( s \right) = \left[ {\frac{{s + 5}}{{{s^2} + 5s + 6}}} \right] + \left[ {\frac{4}{{s\left( {{s^2} + 5s + 6} \right)}}} \right]\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-13%282.43%29.png) |
(2.43) |
Donde  . Entonces, el desarrollo en fracciones parciales12 [12] de la expresión anterior es:
. Entonces, el desarrollo en fracciones parciales12 [12] de la expresión anterior es:
![$Y\left( s \right) = \left[ {\frac{A}{{s + 2}} + \frac{B}{{s + 3}}} \right] + \left[ {\frac{C}{{s + 2}} + \frac{D}{{s + 3}} + \frac{E}{s}} \right]$](/antonio.barragan/files/archivos_usuarios/78/form2.3-16%282.44%29.png) |
(2.44) |
Cada uno de los coeficientes de la expresión anterior puede ser obtenido actuando sobre cada fracción de (2.43) y su desarrollo de (2.44) del modo siguiente:
 |
(2.45) |
Del mismo modo:
|
|
(2.46) |
Por tanto,
 |
(2.47) |
Utilizando una tabla de transformadas se aplica ahora la transformada inversa13 [13] a cada sumando para obtener la solución de la ecuación diferencial (2.39) en el dominio del tiempo:
 |
(2.48) |
Nótese que conforme el tiempo transcurra los términos exponenciales tenderán a cero, de modo que la respuesta a la que tenderá el sistema (respuesta estacionaria) es  .
.
Ejemplo 2.7. Sistema de amplificador operacional. Sea el sistema de amplificadores operacionales ideales de la Figura 2.7, donde se considera que las resistencias y el condensador son también ideales. Se trata de obtener la función de transferencia  .
.
 |
| Figura 2.7. Integrador. |
 |
| Figura 2.8. Integrador. Circuito trans-formado en s. |
Al ser las resistencias y el condensador ideales, su relación tensión/corriente está dada por  e
e  respectivamente. Considerando la salida de estos elementos la tensión y la entrada la corriente podemos, aplicando el concepto de función de transferencia, obtener sus impedancias en el dominio de la transformada de Laplace. Esto es,
respectivamente. Considerando la salida de estos elementos la tensión y la entrada la corriente podemos, aplicando el concepto de función de transferencia, obtener sus impedancias en el dominio de la transformada de Laplace. Esto es, ![\[{{{V_R}\left( s \right)} \mathord{\left/ {\vphantom {{{V_R}\left( s \right)} {{I_R}\left( s \right)}}} \right. \kern-\nulldelimiterspace} {{I_R}\left( s \right)}} = R{\rm{ y }}{{{V_C}\left( s \right)} \mathord{\left/ {\vphantom {{{V_C}\left( s \right)} {{I_C}\left( s \right)}}} \right. \kern-\nulldelimiterspace} {{I_C}\left( s \right)}} = {1 \mathord{\left/ {\vphantom {1 {Cs}}} \right. \kern-\nulldelimiterspace} {Cs}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-26.png) .
.
A partir de aquí, el circuito de la Figura 2.7 puede ser escrito en el dominio de la variable compleja s tal como en la Figura 2.8. Al ser los amplificadores operacionales ideales: 1) se considera el cortocircuito virtual a su entrada, con lo cual la entrada inversora está al potencial de referencia, y 2) la impedancia de entrada es infinita, de modo que sólo circula corriente por el lazo de realimentación. Bajo estas premisas se tiene que
![\[\frac{{{V_i}\left( s \right)}}{{{R_1}}} = - \frac{{{V_a}\left( s \right)}}{{{1 \mathord{\left/ {\vphantom {1 {Cs}}} \right. \kern-\nulldelimiterspace} {Cs}}}}{\rm{ y }}\frac{{{V_a}\left( s \right)}}{{{R_2}}} = - \frac{{{V_o}\left( s \right)}}{{{R_3}}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-27%282.49%29.png) |
(2.49) |
Sustituyendo en la primera ecuación anterior el valor de Va(s) de la segunda, se tiene la función de transferencia buscada:
![\[\frac{{{V_o}\left( s \right)}}{{{V_i}\left( s \right)}} = \frac{{{R_3}}}{{{R_2}}}\frac{1}{{{R_1}Cs}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-28%282.50%29.png) |
(2.50) |
El circuito de la figura 2.7 se denomina integrador porque la señal de salida es la integral de la de la entrada multiplicada por una constante. Esto es:
![${V_o}\left( s \right) = \frac{{{R_3}}}{{{R_2}}}\frac{1}{{{R_1}Cs}}{V_i}\left( s \right);\,\,{\rm{pero }}L\left[ {\int_0^t {f\left( t \right)} dt} \right] = \frac{{F\left( s \right)}}{s}.{\rm{ Por tanto}}{\rm{, }}{L^{ - 1}}\left[ {{V_o}\left( s \right)} \right] = \frac{{{R_3}}}{{{R_1}{R_2}C}}\int_0^t {{v_i}\left( t \right)} \,dt$](/antonio.barragan/files/archivos_usuarios/78/form2.3-29%282.51%29.png) |
(2.51) |
Obtención de la función de transferencia a partir del modelo de estado
Realizados los ejemplos volvamos pues con el objeto de esta sección: obtener la función de transferencia de un sistema de una única entrada y una única salida (SISO) definido por su modelo de estado. Sea éste:
![\[\begin{array}{l} {\bf{\dot x}} = {\bf{Ax}} + {\bf{B}}u \\ y = {\bf{Cx}} + {\bf{D}}u \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-30%282.52%29.png) |
(2.52) |
Aplicando la transformada de Laplace a la ecuación de estado y a la ecuación de salida anteriores, se tiene que
![\[\begin{array}{l} s{\bf{X}}\left( s \right) = {\bf{AX}}\left( s \right) + {\bf{B}}U\left( s \right) \\ Y\left( s \right) = {\bf{CX}}\left( s \right) + {\bf{D}}U\left( s \right) \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-31%282.53%29.png) |
(2.53) |
Donde B es una matriz de orden nx1 debido a que el sistema tiene una única entrada u. Obsérvese que no se tienen en cuenta las condiciones iniciales, ya que lo que se busca es una función de transferencia. Reordenando la ecuación de estado anterior se obtiene que
 |
(2.54) |
Asumiendo la invertibilidad de la matriz  de orden
de orden  , y denominando su inversa
, y denominando su inversa  como
como  , se tiene
, se tiene
 |
(2.55) |
Sustituyendo ahora el valor de X(s) obtenido en la ecuación de salida (2.53), se obtiene
 |
(2.56) |
Por consiguiente, la función de transferencia del sistema  es
es
![\[G\left( s \right) = {\bf{C\Phi }}\left( s \right){\bf{B}} + {\bf{D}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-40%282.57%29.png) |
(2.57) |
Puesto que
 |
(2.58) |
Queda claro que el polinomio denominador de la función de transferencia es  . Esto es, los polos14 [14] del sistema coinciden con los valores propios o autovalores de la matriz A, ya que se obtienen a partir de su ecuación característica o polinomio característico. En conclusión, los polos del sistema dependen sólo de la matriz A, mientras que los ceros15 [15] dependen de las matrices A, B, C y D.
. Esto es, los polos14 [14] del sistema coinciden con los valores propios o autovalores de la matriz A, ya que se obtienen a partir de su ecuación característica o polinomio característico. En conclusión, los polos del sistema dependen sólo de la matriz A, mientras que los ceros15 [15] dependen de las matrices A, B, C y D.
Llegados a este punto cabría preguntarse por la utilidad de la expresión (2.57); la respuesta es inmediata: permite obtener de forma directa la función de transferencia de un modelo de estado lineal de una entrada y una salida (SISO).
Comentario: Desde el punto de vista de los autores, si bien el concepto de la transformada de Laplace es de mucha utilidad en ingeniería de control (y en general en automática), y más aún el de función de transferencia que se deriva del primero, se ha preferido introducir los conceptos en el texto desde lo general a lo particular. Así, mientras el modelo de estado descrito por la expresión (2.8) es absolutamente genera (no lineal y MIMO); el modelo de estado que posibilita la aplicación de la expresión (2.57) es bastante más restrictivo (lineal y SISO).
Una vez sentadas las bases de los ámbitos de uso de las expresiones deducidas, se realizará un ejemplo de aplicación de la expresión (2.57).
Ejemplo 2.8. Función de transferencia de un modelo de estado. Sea el modelo de estado que se dedujo en el Ejemplo 2.1, el cual está dado por la ecuación (2.7). Por comodidad, se escribe de nuevo a continuación.
![\[\left( {\begin{array}{*{20}{c}} {{{\dot x}_1}\left( t \right)} \\ {{{\dot x}_2}\left( t \right)} \\ \end{array}} \right) = \left( {\begin{array}{*{20}{c}} 0 & 1 \\ { - \frac{k}{m}} & { - \frac{\beta }{m}} \\ \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)} \\ {{x_2}\left( t \right)} \\ \end{array}} \right) + \left( {\begin{array}{*{20}{c}} 0 \\ {\frac{1}{m}} \\ \end{array}} \right)u\left( t \right){\rm{ e }}y\left( t \right) = \left( {\begin{array}{*{20}{c}} 1 & 0 \\ \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)} \\ {{x_2}\left( t \right)} \\ \end{array}} \right) + 0{\kern 1pt} u\left( t \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-43%282.59%29.png) |
(2.59) |
Para este caso se tiene pues que
![\[\left( {s{\rm{I}} - {\rm{A}}} \right) = \left( {\left( {\begin{array}{*{20}{c}} s & 0 \\ 0 & s \\ \end{array}} \right) - \left( {\begin{array}{*{20}{c}} 0 & 1 \\ { - \frac{k}{m}} & { - \frac{\beta }{m}} \\ \end{array}} \right)} \right) = \left( {\begin{array}{*{20}{c}} s & { - 1} \\ {\frac{k}{m}} & {s + \frac{\beta }{m}} \\ \end{array}} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-44%282.60%29.png) |
(2.60) |
Por consiguiente,
![\[{\bf{\Phi }}\left( s \right) = {\left( {s{\rm{I}} - {\rm{A}}} \right)^{ - 1}} = \frac{1}{{\Delta \left( s \right)}}\left( {\begin{array}{*{20}{c}} {s + \frac{\beta }{m}} & 1 \\ { - \frac{k}{m}} & s \\ \end{array}} \right);{\rm{ donde }}\Delta \left( s \right) = \left| {\begin{array}{*{20}{c}} s & { - 1} \\ {\frac{k}{m}} & {s + \frac{\beta }{m}} \\ \end{array}} \right| = {s^2} + \frac{\beta }{m}s + \frac{k}{m}\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-45%282.61%29.png) |
(2.61) |
A partir de aquí, aplicando (2.57), se obtiene de forma inmediata la función de transferencia del modelo de estado:
![\[G\left( s \right) = \frac{{Y\left( s \right)}}{{U\left( s \right)}} = {\bf{C\Phi }}\left( s \right){\bf{B}} + {\bf{D}} = \left( {\begin{array}{*{20}{c}} 1 & 0 \\ \end{array}} \right)\left( {\begin{array}{*{20}{c}} {\frac{{s + \frac{\beta }{m}}}{{\Delta \left( s \right)}}} & {\frac{1}{{\Delta \left( s \right)}}} \\ { - \frac{k}{{m\Delta \left( s \right)}}} & {\frac{s}{{\Delta \left( s \right)}}} \\ \end{array}} \right)\left( {\begin{array}{*{20}{c}} 0 \\ {\frac{1}{m}} \\ \end{array}} \right) + 0 = \frac{{{1 \mathord{\left/ {\vphantom {1 m}} \right. \kern-\nulldelimiterspace} m}}}{{\Delta \left( s \right)}} = \frac{{{1 \mathord{\left/ {\vphantom {1 m}} \right. \kern-\nulldelimiterspace} m}}}{{{s^2} + \frac{\beta }{m}s + \frac{k}{m}}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-46%282.62%29.png) |
(2.62) |
Nótese que a este mismo resultado se podría haber llegado de forma directa, esto es, aplicando la transformada de Laplace y el concepto de función de transferencia sobre la ecuación diferencial (2.2) que caracteriza el comportamiento dinámico del sistema:
![\[m\ddot y\left( t \right) = u\left( t \right) - \beta \dot y\left( t \right) - ky\left( t \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-47%282.63%29.png) |
(2. 63) |
Aplicando la transformada de Laplace a la ecuación anterior con condiciones iniciales nulas:
![\[m{s^2}Y\left( s \right) = U\left( s \right) - \beta sY\left( s \right) - kY\left( s \right) \Rightarrow Y\left( s \right)\left( {{s^2} + \frac{\beta }{m}s + \frac{k}{m}} \right) = \frac{{U\left( s \right)}}{m} \Rightarrow G\left( s \right) = \frac{{Y\left( s \right)}}{{U\left( s \right)}} = \frac{{{1 \mathord{\left/ {\vphantom {1 m}} \right. \kern-\nulldelimiterspace} m}}}{{{s^2} + \frac{\beta }{m}s + \frac{k}{m}}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.3-48%282.64%29.png) |
(2.64) |
Desde el punto de vista del modelo de estado, una vez que se ha obtenido éste interesa conocer la información que proporciona, esto es, la posibilidad de analizar el comportamiento dinámico del sistema a lo largo del tiempo. Para ello se debe tener una expresión explícita de la solución o trayectoria del sistema en su espacio de estado, esto es, del vector de estado. Esta solución exige el cálculo de la ecuación de estado. Cuando ésta es no lineal, su solución puede ser muy compleja, de modo que la mayoría de las veces habrá que descartar la obtención de una expresión analítica, quedando pues la solución en el ámbito del análisis numérico realizado mediante computador. Sin embargo, cuando la ecuación de estado es lineal, bien porque el sistema lo es, o bien porque es el resultado de la linealización de un sistema no lineal, la ecuación de estado admite una solución analítica que es fácil de obtener y proporciona una información muy rica de la evolución temporal de las trayectorias (coordenadas del vector de estado) del sistema.
Sea pues la ecuación de estado en su forma lineal siguiente:
 |
(2.65) |
Aplicando la transformada de Laplace con la condición inicial  se tiene que
se tiene que
 |
(2.66) |
O también
 |
(2.67) |
Esto es,
 |
(2.68) |
Como se sabe,  por tanto,
por tanto,
 |
(2.69) |
Aplicando la transformada inversa de Laplace para obtener la solución temporal se tiene que
![${\bf{x}}\left( t \right) = {L^{\,\, - 1}}\left[ {{\bf{\Phi }}\left( s \right)} \right]\,{\bf{x}}\left( {\bf{0}} \right) + {L^{\,\, - 1}}\left[ {{\bf{\Phi }}\left( s \right){\bf{BU}}\left( s \right)} \right]$](/antonio.barragan/files/archivos_usuarios/78/form2.4-8%282.70%29.png) |
(2.70) |
La matriz
![${\bf{\Phi }}\left( t \right) = {L^{\,\, - 1}}\left[ {{\bf{\Phi }}\left( s \right)} \right]\,$](/antonio.barragan/files/archivos_usuarios/78/form2.4-9%282.71%29.png) |
(2.71) |
se denomina matriz de transición de estado. Nótese en la ecuación (2.70) como la matriz de transición de estado representa el paso del sistema desde el estado inicial  al considerado
al considerado  cuando la entrada es cero; esto es, describe la respuesta no forzada o natural del sistema.
cuando la entrada es cero; esto es, describe la respuesta no forzada o natural del sistema.
Teniendo en cuenta la operación de convolución16 en el dominio de la transformada de Laplace:
![$L\left[ {\int\limits_0^t {{f_1}\left( {t - \tau } \right){f_2}\left( \tau \right)d\tau } } \right] = {F_1}\left( s \right){F_2}\left( s \right);{\rm{ donde }}{F_1}\left( s \right) = L\left[ {{f_1}\left( t \right)} \right]{\rm{ y }}{F_2}\left( s \right) = L\left[ {{f_2}\left( t \right)} \right]$](/antonio.barragan/files/archivos_usuarios/78/form2.4-13%282.72%29.png) |
(2.72) |
Se tiene que la ecuación (2.70) puede ser escrita como
 |
(2.73) |
Donde  representa un adelanto en el tiempo de valor
representa un adelanto en el tiempo de valor  de la función
de la función  . La ecuación (2.73) es la solución de la ecuación diferencial de estado dada por (2.65). Evidentemente, si se conocen las condiciones iniciales
. La ecuación (2.73) es la solución de la ecuación diferencial de estado dada por (2.65). Evidentemente, si se conocen las condiciones iniciales  , la entrada
, la entrada  y la matriz de transición
y la matriz de transición  , puede calcularse numéricamente la solución de la ecuación de estado o respuesta temporal del vector de estado. Cuando el sistema no está forzado
, puede calcularse numéricamente la solución de la ecuación de estado o respuesta temporal del vector de estado. Cuando el sistema no está forzado  ésta es simplemente
ésta es simplemente
 |
(2.74) |
Se puede comprobar fácilmente que la matriz de transición de estado  está dada por
está dada por
 |
(2.75) |
Donde  se denomina matriz exponencial. En efecto, supóngase que la entrada del sistema modelado por (2.65) es nula, con lo cual
se denomina matriz exponencial. En efecto, supóngase que la entrada del sistema modelado por (2.65) es nula, con lo cual
 |
(2.76) |
Entonces, la solución de esta ecuación diferencial es, según (2.74),
 |
(2.77) |
Sustituyendo esta expresión en (2.76) se tiene que
 |
(2.78) |
Nótese que al derivar (2.77), el paso de esta ecuación a la (2.78) es inmediato si  está dada por (2.75). Por tanto, la solución de la ecuación diferencial de estado puede ser escrita también como
está dada por (2.75). Por tanto, la solución de la ecuación diferencial de estado puede ser escrita también como
 |
(2.79) |
Ejemplo 2.9. Respuesta temporal del sistema muelle – masa – amortiguador. Considérese que los valores de m, k y β del sistema de la figura 2.1 son tales que su ecuación de estado (2.7) está dada por
 |
(2.80) |
Con objeto de evaluar la respuesta temporal del sistema se ha de calcular primero la matriz  la cual se obtiene de la forma
la cual se obtiene de la forma
![\[\left( {s{\rm{I}} - {\rm{A}}} \right) = \left( {\left( {\begin{array}{*{20}{c}} s & 0 \\ 0 & s \\ \end{array}} \right) - \left( {\begin{array}{*{20}{c}} \hfill 0 & \hfill 1 \\ \hfill { - 2} & \hfill { - 3} \\ \end{array}} \right)} \right) = \left( {\begin{array}{*{20}{c}} s & { - 1} \\ 2 & {s + 3} \\ \end{array}} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-34%282.81%29.png) |
(2.81) |
Por consiguiente,
![\[{\bf{\Phi }}\left( s \right) = {\left( {s{\rm{I}} - {\rm{A}}} \right)^{ - 1}} = \frac{1}{{\Delta \left( s \right)}}\left( {\begin{array}{*{20}{c}} {s + 3} & 1 \\ { - 2} & s \\ \end{array}} \right);{\rm{ donde }}\Delta \left( s \right) = \left| {\begin{array}{*{20}{c}} s & { - 1} \\ 2 & {s + 3} \\ \end{array}} \right| = {s^2} + 3s + 2 = \left( {s + 1} \right)\left( {s + 2} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-35%282.82%29.png) |
(2.82) |
Ahora, con objeto de obtener la descomposición en fracciones parciales se escribe
![\[{\bf{\Phi }}\left( s \right) = \left( {\begin{array}{*{20}{c}} {\frac{{s + 3}}{{\left( {s + 1} \right)\left( {s + 2} \right)}}} & {\frac{1}{{\left( {s + 1} \right)\left( {s + 2} \right)}}} \\ {\frac{{ - 2}}{{\left( {s + 1} \right)\left( {s + 2} \right)}}} & {\frac{s}{{\left( {s + 1} \right)\left( {s + 2} \right)}}} \\ \end{array}} \right) = \left( {\begin{array}{*{20}{c}} {\frac{A}{{s + 1}} + \frac{B}{{s + 2}}} & {\frac{C}{{s + 1}} + \frac{D}{{s + 2}}} \\ {\frac{E}{{s + 1}} + \frac{F}{{s + 2}}} & {\frac{G}{{s + 1}} + \frac{H}{{s + 2}}} \\ \end{array}} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-36%282.83%29.png) |
(2.83) |
Operando como en el ejemplo 2.6 se tiene que
![\[{\bf{\Phi }}\left( s \right) = \left( {\begin{array}{*{20}{c}} {\frac{2}{{s + 1}} - \frac{1}{{s + 2}}} & {\frac{1}{{s + 1}} - \frac{1}{{s + 2}}} \\ { - \frac{2}{{s + 1}} + \frac{2}{{s + 2}}} & { - \frac{1}{{s + 1}} + \frac{2}{{s + 2}}} \\ \end{array}} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-37%282.84%29.png) |
(2.84) |
Aplicando ahora la transformada inversa de Laplace,
![\[{\bf{\Phi }}\left( t \right) = {e^{{\bf{A}}t}} = {L^{\,\, - 1}}\left[ {{\bf{\Phi }}\left( s \right)} \right]\, = \left( {\begin{array}{*{20}{c}} {2{e^{ - t}} - {e^{ - 2t}}} & {{e^{ - t}} - {e^{ - 2t}}} \\ { - 2{e^{ - t}} + 2{e^{ - 2t}}} & { - {e^{ - t}} + 2{e^{ - 2t}}} \\ \end{array}} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-38%282.85%29.png) |
(2.85) |
Una vez calculada la matriz de transición de estado, la respuesta temporal del sistema para diferentes condiciones iniciales y señales de entrada puede calcularse mediante la ecuación (2.73). Por ejemplo, cuando ![\[{x_1}\left( 0 \right) = {x_2}\left( 0 \right) = 1{\rm{ y }}u\left( t \right) = 0\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-39.png) se tiene que
se tiene que
 |
(2.86) |
El la figura 2.9 se muestra la evolución temporal del vector de estado para las condiciones iniciales dadas. Nótese que aunque la velocidad  empieza a decrecer enseguida, hasta que no se hace cero, la masa (ver Figura 2.1) no para de moverse hacia abajo, con lo cual
empieza a decrecer enseguida, hasta que no se hace cero, la masa (ver Figura 2.1) no para de moverse hacia abajo, con lo cual  crece en este intervalo. En la Figura 2.10 se muestra la trayectoria del vector de estado en el espacio de estado del sistema (plano
crece en este intervalo. En la Figura 2.10 se muestra la trayectoria del vector de estado en el espacio de estado del sistema (plano  ). Esta representación se denomina retrato de fase. Nótese como el vector de estado, conforme el sistema va perdiendo la energía del estado inicial, tiende al punto (0,0) que es el punto de equilibrio o estado de mínima energía. El retrato de fase y el concepto de punto de equilibrio serán tratados en profundidad en el capítulo siguiente.
). Esta representación se denomina retrato de fase. Nótese como el vector de estado, conforme el sistema va perdiendo la energía del estado inicial, tiende al punto (0,0) que es el punto de equilibrio o estado de mínima energía. El retrato de fase y el concepto de punto de equilibrio serán tratados en profundidad en el capítulo siguiente.
 |
 |
Figura 2.9. Respuesta temporal de las variables de estado para ![\[{x_1}\left( 0 \right) = {x_2}\left( 0 \right) = 1{\rm{ y }}u\left( t \right) = 0.\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-44.png) |
|
 |
|
| Figura 2.10. Trayectoria del vector de estado en el espacio de estado | |
Considérese ahora que el sistema está forzado, esto es,  . Sea por ejemplo la función escalón unitario,
. Sea por ejemplo la función escalón unitario,  . En este caso, la ecuación (2.73) ha de ser usada en toda su extensión, utilizando el valor ya calculado de la matriz de transición
. En este caso, la ecuación (2.73) ha de ser usada en toda su extensión, utilizando el valor ya calculado de la matriz de transición  .
.
![\[{\bf{x}}\left( t \right) = \left( {\begin{array}{*{20}{c}} {2{e^{ - t}} - {e^{ - 2t}}} & {{e^{ - t}} - {e^{ - 2t}}} \\ { - 2{e^{ - t}} + 2{e^{ - 2t}}} & { - {e^{ - t}} + 2{e^{ - 2t}}} \\ \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{x_1}\left( 0 \right)} \\ {{x_2}\left( 0 \right)} \\ \end{array}} \right) + \int\limits_0^t {\,\left( {\begin{array}{*{20}{c}} {2{e^{ - \left( {t - \tau } \right)}} - {e^{ - 2\left( {t - \tau } \right)}}} & {{e^{ - \left( {t - \tau } \right)}} - {e^{ - 2\left( {t - \tau } \right)}}} \\ { - 2{e^{ - \left( {t - \tau } \right)}} + 2{e^{ - 2\left( {t - \tau } \right)}}} & { - {e^{ - \left( {t - \tau } \right)}} + 2{e^{ - 2\left( {t - \tau } \right)}}} \\ \end{array}} \right)} \left( {\begin{array}{*{20}{c}} 0 \\ 1 \\ \end{array}} \right)\left( 1 \right)d\tau \]](/antonio.barragan/files/archivos_usuarios/78/form2.4-51.png) |
(2.87) |
Después de operar con las matrices, el sumando que contiene la integral queda como
|
\[\begin{array}{l} \int\limits_0^t {\,\left( {\begin{array}{*{20}{c}} {{e^{ - \left( {t - \tau } \right)}} - {e^{ - 2\left( {t - \tau } \right)}}} \\ { - {e^{ - \left( {t - \tau } \right)}} + 2{e^{ - 2\left( {t - \tau } \right)}}} \\ \end{array}} \right)} d\tau = \left( {\begin{array}{*{20}{c}} {\int\limits_0^t {\left( {{e^{ - \left( {t - \tau } \right)}} - {e^{ - 2\left( {t - \tau } \right)}}} \right)} \,d\tau } \\ {\int\limits_0^t {\left( { - {e^{ - \left( {t - \tau } \right)}} + 2{e^{ - 2\left( {t - \tau } \right)}}} \right)} \,d\tau } \\ \end{array}} \right) = \left( {\begin{array}{*{20}{c}} {{e^{ - t}}\int\limits_0^t {{e^\tau }d\tau - {e^{ - 2\tau }}\int\limits_0^t {{e^{2\tau }}d\tau } } } \\ { - {e^{ - t}}\int\limits_0^t {{e^\tau }d\tau + 2{e^{ - 2t}}\int\limits_0^t {{e^{2\tau }}d\tau } } } \\ \end{array}} \right) = \\ \left( {\begin{array}{*{20}{c}} {{e^{ - t}}\left[ {{e^\tau }} \right]_0^t - {\textstyle{1 \over 2}}{e^{ - 2\tau }}\left[ {{e^{2\tau }}} \right]_0^t} \\ { - {e^{ - t}}\left[ {{e^\tau }} \right]_0^t + {\textstyle{2 \over 2}}{e^{ - 2\tau }}\left[ {{e^{2\tau }}} \right]_0^t} \\ \end{array}} \right) = \left( {\begin{array}{*{20}{c}} { - {e^{ - t}} + {\textstyle{1 \over 2}}{e^{ - 2t}} + {\textstyle{1 \over 2}}} \\ {{e^{ - t}} - {e^{ - 2t}}} \\ \end{array}} \right) \\ \end{array}\] |
(2.88) |
 |
 |
Figura 2.11. Respuesta temporal de las variables de estado para ![\[{x_1}\left( 0 \right) = {x_2}\left( 0 \right) = 0{\rm{ y }}u\left( t \right) = 1\left( t \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-52-c.png) . . |
|
Con lo cual la ecuación (2.87) se escribirá de la forma
![\[\left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)} \\ {{x_2}\left( t \right)} \\ \end{array}} \right) = \left( {\begin{array}{*{20}{c}} {2{e^{ - t}} - {e^{ - 2t}}} & {{e^{ - t}} - {e^{ - 2t}}} \\ { - 2{e^{ - t}} + 2{e^{ - 2t}}} & { - {e^{ - t}} + 2{e^{ - 2t}}} \\ \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{x_1}\left( 0 \right)} \\ {{x_2}\left( 0 \right)} \\ \end{array}} \right) + \left( {\begin{array}{*{20}{c}} { - {e^{ - t}} + {\textstyle{1 \over 2}}{e^{ - 2t}} + {\textstyle{1 \over 2}}} \\ {{e^{ - t}} - {e^{ - 2t}}} \\ \end{array}} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-53%282.89%29.png) |
(2.89) |
La expresión anterior es la solución completa al comportamiento dinámico del sistema cuando la entrada es una señal escalón unitario. Por tanto, para conocer el estado del sistema en un instante de tiempo t, sólo hay que sustituir en la ecuación el valor de ese tiempo junto a las condiciones iniciales. Así por ejemplo, si el estado inicial es cero, la respuesta del sistema (trayectoria del vector de estado) es
![\[\left( {\begin{array}{*{20}{c}} {{x_1}\left( t \right)} \\ {{x_2}\left( t \right)} \\ \end{array}} \right) = \left( {\begin{array}{*{20}{c}} { - {e^{ - t}} + {\textstyle{1 \over 2}}{e^{ - 2t}} + {\textstyle{1 \over 2}}} \\ {{e^{ - t}} - {e^{ - 2t}}} \\ \end{array}} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-54%282.90%29.png) |
(2.90) |
El la figura 2.11 se muestra la evolución temporal del vector de estado según la ecuación (2.90). A modo de conclusión, en este ejemplo se ha mostrado como mediante la ecuación general (2.73), que implica el cálculo previo de la matriz de transición de estado17 [16], se puede calcular la respuesta temporal completa de un sistema (respuesta natural o no forzada más respuesta forzada) y, por ende, conocer su estado en cualquier instante t. Aunque su aplicación se limita a los sistemas lineales, esta metodología constituye una herramienta poderosa y fácil de escribir en forma de algoritmo para ser ejecutada en un computador.
En los sistemas de control de hoy en día el controlador suele ser un computador (ver Figura 1.1), con lo cual sus datos de entrada (y también de salida) son palabras digitales codificadas en binario. El circuito electrónico que presenta al computador una cadena de ceros y unos correspondientes al valor analógico de entrada convertido a digital es el convertidor analógico/digital (A/D); sin embargo, previo a él hay un circuito, integrado o no en el mismo convertidor, que se denomina muestreador y retenedor (sample & hold en inglés, S&H). La función del S&H es doble: 1) obtener muestras de la señal analógica cada cierto tiempo, normalmente constante, denominado periodo de muestreo T, y 2) mantener la señal muestreada constante el tiempo suficiente para que al convertidor A/D le dé tiempo a convertirla en una palabra digital.
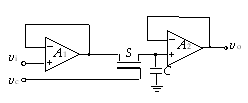 |
| Figura 2.12. Muestreador & retenedor. |
En la Figura 2.12 se muestra un esquema sencillo, casi conceptual, de S&H. Cuando una señal de control activa el interruptor S (un transistor MOSFET por ejemplo) el condensador C (un condensador de calidad para evitar fugas) se carga a la señal de entrada vi a través de la pequeña resistencia de entrada de A1 en configuración seguidor de tensión. Cuando la señal de control deja de estar activa, el interruptor se abre y la tensión almacenada en el condensador (señal muestreada) permanece estática, ya que la elevada resistencia de entrada de A2, también en configuración seguidor de tensión, evita su descarga. La tensión en el condensador es la de salida de A2, v0, y alimenta al convertidor A/D que iría a continuación. La señal de control del S&H debe ir ligada a la actuación del convertidor, con objeto de asegurar que éste tenga el tiempo suficiente para efectuar la conversión antes de capturar una nueva muestra. Nótese que el S&H funciona como una memoria analógica. En muestreo está memorizando la señal de entrada, mientras que en retención la recuerda y la mantiene en el tiempo.
En la Figura 2.13 se muestra de forma esquemática el efecto del muestreo sobre una señal continua 18 [17]. A partir de ésta, el circuito muestreador va obteniendo muestras ![\[x\left( 0 \right),x\left( 1 \right), \ldots ,x\left( n \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-57.png) cada incrementos de tiempo
cada incrementos de tiempo ![\[t\left( 0 \right),t\left( 1 \right), \ldots ,t\left( n \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.5-3.png) . El incremento de tiempo
. El incremento de tiempo  entre cada muestra es el tiempo o periodo de muestreo T, que normalmente es constante, con lo cual los intervalos temporales pueden ser escritos como
entre cada muestra es el tiempo o periodo de muestreo T, que normalmente es constante, con lo cual los intervalos temporales pueden ser escritos como  donde k es un índice entero de valor
donde k es un índice entero de valor ![\[k = 0,1,2, \ldots \]](/antonio.barragan/files/archivos_usuarios/78/form2.5-6.png)
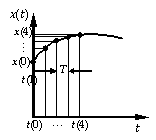 |
| Figura 2.13. Muestreo de una señal. |
El control por computador implica que las leyes de control se implementen mediante software19, con lo cual las acciones a realizar sobre un sistema bajo control se desarrollan en el computador mediante un algoritmo20 [18], el cual trabaja en tiempo discreto. Esto implica que el trabajo con el computador involucra el manejo de señales cuyo valor es aproximado, ya que no se tienen completas. Sin embargo, esto no quiere decir que a efectos prácticos se obtengan menos prestaciones, ya que el error, la mayoría de las veces, se puede acotar, con lo cual bastará con utilizar un periodo de muestreo más pequeño para obtener mayor precisión21 [19].
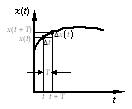 |
| Figura 2.14. Definición de derivada. |
Ejemplo 2.10. Solución aproximada de una ecuación diferencial ordinaria. Considérese el cálculo numérico de una ecuación diferencial ordinaria de primer orden y sea ésta, como ejemplo, la siguiente:
| (2.91) |
La rama de las matemáticas que soluciona este tipo de problemas es el análisis o cálculo numérico. Esta disciplina crea algoritmos que permiten resolver problemas, en los que estén involucradas cantidades numéricas, con una precisión determinada.
El análisis numérico es de aplicación cuando: 1) Los problemas no tienen solución analítica o 2) el coste de cálculo de la solución analítica es mayor que la numérica. Para la resolución de ecuaciones diferenciales ordinarias los métodos más utilizados son el método de Euler y los métodos de Runge-Kutta22 [20].
Volviendo con el ejemplo, nótese en la Figura 2.14 que para T pequeño,  puede aproximarse por la relación incremental (definición de derivada) siguiente:
puede aproximarse por la relación incremental (definición de derivada) siguiente:
| (2.92) |
Resolviendo la ecuación anterior para  se tiene que
se tiene que
 |
(2.93) |
Evaluando esta ecuación para un tiempo discreto cualquiera t = kT se obtiene la ecuación en diferencias siguiente:
![$x\left[ {\left( {k + 1} \right)T} \right] = \left( {1 + Ta} \right)x\left( {kT} \right) + T\,b\,u\left( {kT} \right)$](/antonio.barragan/files/archivos_usuarios/78/form2.5.1-5%282.94%29.png) |
(2.94) |
La cual, para un T dado, puede ser escrita como
 |
(2.95) |
La expresión anterior indica que el valor de la trayectoria (solución) en el instante de tiempo  se calcula a partir del valor de x y de la excitación (entrada) u en el instante k.
se calcula a partir del valor de x y de la excitación (entrada) u en el instante k.
La ecuación diferencial original (2.91) ha sido pues transformada por este método numérico sencillo (denominado de Euler23 [21]) en la ecuación en diferencias (2.94). Ésta puede ser programada ahora mediante un algoritmo numérico simple en un computador. Así por ejemplo, si  ,
,  y
y  para k par;
para k par; para k impar, y
para k impar, y  , se tiene que las primeras 5 muestras de
, se tiene que las primeras 5 muestras de  valen
valen
![\[\begin{array}{*{20}{c}} {x\left( 0 \right) = 2x\left( { - 1} \right) + u\left( { - 1} \right) = 0} \hfill \\ {x\left( 1 \right) = 2x\left( 0 \right) + u\left( 0 \right) = 0 + 1 = 1} \hfill \\ {x\left( 2 \right) = 2x\left( 1 \right) + u\left( 1 \right) = 2 + 0 = 2} \hfill \\ {x\left( 3 \right) = 2x\left( 2 \right) + u\left( 2 \right) = 4 + 1 = 5} \hfill \\ {x\left( 4 \right) = 2x\left( 3 \right) + u\left( 3 \right) = 10 + 0 = 10} \hfill \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.1-13.png) |
(2.96) |
Si se observa la ecuación (2.91), su expresión es la de un modelo de estado de orden 1 y, por ende, la ecuación (2.95) es la discretización de un modelo de estado de orden 1. Con objeto de extender lo anterior para el caso de sistemas de orden mayor que 1, se parte de la ecuación de estado lineal general que reproducimos a continuación por comodidad:
|
|
(2.97) |
Aplicando a esta ecuación el proceso descrito para llegar de (2.91) a (2.95), se tiene que la ecuación matricial en diferencias del modelo de estado lineal continuo estará dada por
 |
(2.98) |
Esta ecuación permite ver enseguida que la ecuación de estado discreta lineal tiene un aspecto muy similar a la de tiempo continuo. Ahora también dos matrices multiplican a los vectores de estado y de entrada igual que en el caso continuo. Respecto de la dependencia temporal de las variables, sus argumentos han sido sustituidos por el tiempo discreto k y por k + 1 para el vector de estado derivado. Esto se formalizará en la sección siguiente.
Ejemplo 2.11. Solución aproximada de un modelo de estado continuo de orden 2. Veamos una aplicación de la ecuación (2.98). Se van a calcular los primeros 4 valores discretos (iteraciones) del modelo continuo de ejemplo siguiente:
 |
(2.99) |
Supóngase que T=0,02s, en cuyo caso la aplicación de la ecuación (2.98) sobre el ejemplo proporciona la expresión siguiente:
 |
(2.100) |
Esto es,
 |
(2.101) |
Sea  ,
,  , una señal escalón, con lo cual
, una señal escalón, con lo cual  ,
,  . Sea también
. Sea también  . Entonces,
. Entonces,
 |
(2.102) |
Ejemplo 2.12. Respuesta temporal aproximada del sistema muelle – masa - amortiguador. En el ejemplo 2.9 se calculó la respuesta temporal exacta (analítica) de este sistema empleando la m-triz de transición de estado. Ahora se va a calcular de nuevo la respuesta temporal, pero mediante la aproximación en tiempo discreto.
El objetivo de este ejemplo es comparar la respuesta exacta del ejemplo 2.9 con la aproximada de éste; por ello es muy importante empezar a establecer una serie de pautas prácticas que permitirán obtener aproximaciones razonables.
La primera cuestión a considerar es qué periodo de muestreo elegir. Tal como se vio en la Figura 2.14, se ha de elegir un intervalo de tiempo T suficientemente pequeño de forma que la aproximación de derivada (ecuación 2.92) sea razonablemente precisa. Lógicamente, cada sistema tiene su propia dinámica y, en consecuencia, un periodo de muestreo que puede ser válido para un sistema no tiene porqué serlo para otro. Las Figuras 2.9 y 2.11 muestran la respuesta temporal del sistema objeto de análisis. Una observación mínima de las figuras no aconsejaría un tiempo de muestreo de por ejemplo T=0,2s; sin embargo, supóngase que el análisis no se ha realizado y se emplea este tiempo de muestreo, con lo cual la ecuación (2.97) es
 |
(2.103) |
Sustituyendo en esta ecuación los valores de las matrices A y B dadas en (2.80),
 |
(2.104) |
Esto es,
 |
(2.105) |
Ahora, con objeto de comparar la respuesta aproximada en tiempo discreto con la exacta del ejemplo 2.9, considérese la aplicación de las mismas condiciones iniciales a la ecuación (2.105), ![\[{x_1}\left( 0 \right) = {x_2}\left( 0 \right) = 1\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.1-26.png) y
y ![\[u\left( t \right) = 0\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.1-27.png) , en cuyo caso la primera iteración proporciona el valor siguiente:
, en cuyo caso la primera iteración proporciona el valor siguiente:
 |
(2.106) |
Para las tres iteraciones siguientes se obtiene que
  |
(2.107) |
El cálculo exacto para las 4 iteraciones: 0,2 s; 0,4 s; 0,6 s y 0,8 s; se realiza mediante la expresión (2.86):
| Tabla 2.1 | |||||||||
| Tiempo t | 0 | 0,2 | Error | 0,4 | Error | 0,6 | Error | 0,8 | Error |
 exacto exacto |
1 | 1,1156 | 7,56% | 1,1123 | 7,88% | 1,0440 | 14,94% | 0,9442 | 2,69% |
|
aprox., T=0,2s |
1 | 1,2 | 1,2 | 1,2 | 0.9696 | ||||
 exacto exacto |
1 | 0,2251 | -100% | -0,2136 | -124,72% | -0,4417 | -52,14% | -0,5404 | -31,46% |
|
aprox., T=0,2s |
1 | 0 | -0,48 | -0,672 | -0,7104 | ||||
|
|
(2.108) |
En la tabla 2.1 se resumen los resultados obtenidos junto al error cometido. Como se puede comprobar, el error cometido en es muy grande. Esto se comprende fácilmente observando la Figura 2.9, ya la pendiente negativa de al inicio es muy pronunciada, lo cual supone que su valor cambia mucho en 0,2 s.
Formalmente hablando, la frecuencia de muestreo24 [22] o inversa del periodo de muestreo, debe ser al menos el doble de la frecuencia más alta contenida en la señal analógica a muestrear. En la práctica es aconsejable que la frecuencia de muestreo esté comprendida entre 10 y 20 veces la de la frecuencia más alta contenida en la señal analógica a muestrear.
Si en vez del periodo de muestreo tomado se hubiera elegido uno 10 veces menor (frecuencia de muestreo 10 veces mayor), T=0,02s, el valor aproximado de en la primera iteración por ejemplo, hubiera sido 0,9; y el real para t=0,02s, 0,9026. Esto es, dividiendo el periodo de muestreo por 10 el error pasa de -100% a -0,29%.
En los sistemas discretos  es una secuencia vectorial cuyo valor en cualquier punto de la secuencia es el estado del sistema en ese instante de tiempo discreto. También, al igual que en los sistemas continuos, el espacio de estado se define como el espacio vectorial donde toma valores el vector de estado . De la misma forma, teniendo en cuenta que el estado se concreta como la mínima cantidad de información (mínimo conjunto de variables) precisa para conocer la evolución del sistema para todo kT, las variables de estado en tiempo discreto son también linealmente independientes, con lo cual la dimensión del espacio de estado coincide con el número de variables de estado.
es una secuencia vectorial cuyo valor en cualquier punto de la secuencia es el estado del sistema en ese instante de tiempo discreto. También, al igual que en los sistemas continuos, el espacio de estado se define como el espacio vectorial donde toma valores el vector de estado . De la misma forma, teniendo en cuenta que el estado se concreta como la mínima cantidad de información (mínimo conjunto de variables) precisa para conocer la evolución del sistema para todo kT, las variables de estado en tiempo discreto son también linealmente independientes, con lo cual la dimensión del espacio de estado coincide con el número de variables de estado.
En virtud de lo anterior y por analogía con los sistemas continuos, se define como modelo de estado discreto de un sistema dinámico invariante con el tiempo, para un periodo de muestreo T dado, una relación matemática entre dos secuencias de entrada  y salida
y salida  del modo siguiente:
del modo siguiente:
 |
(2.109) |
Donde la primera ecuación en  es la ecuación de estado, y la segunda en k es la de salida. La secuencia
es la ecuación de estado, y la segunda en k es la de salida. La secuencia  representa el vector de estado en tiempo discreto. Nótese por comparación de las ecuaciones (2.109) y (2.8) cómo para el caso discreto el modelo de estado se formula me-diante ecuaciones en diferencias, mientras que para el caso continuo se hace mediante ecuacio-nes diferenciales. Nótese también que si el sistema no fuera invariante con el tiempo (ver la primera sección del capítulo 3), las ecuaciones (2.107) deberían ser escritas como
representa el vector de estado en tiempo discreto. Nótese por comparación de las ecuaciones (2.109) y (2.8) cómo para el caso discreto el modelo de estado se formula me-diante ecuaciones en diferencias, mientras que para el caso continuo se hace mediante ecuacio-nes diferenciales. Nótese también que si el sistema no fuera invariante con el tiempo (ver la primera sección del capítulo 3), las ecuaciones (2.107) deberían ser escritas como  e
e  .
.
El concepto de linealidad en los sistemas discretos es análogo al de los sistemas continuos. Esto es, un modelo de estado discreto lineal e invariante con el tiempo puede ser escrito de la forma matricial siguiente:
 |
(2.110) |
Donde es el vector de estado en el instante k (de dimensión n),  es el vector de entrada en el instante k (de dimensión p) e
es el vector de entrada en el instante k (de dimensión p) e  es el vector de salida en el instante k (de dimensión q). Ak, Bk, Ck y Dk son matrices constantes. La matriz Ak se denomina matriz de estado o matriz dinámica (de dimensión ), la matriz Bk se denomina matriz de entrada o matriz de control (de dimensión ), la matriz Ck se denomina matriz de salida o matriz sensora (de dimensión ), y la matriz Dk se denomina matriz de transferencia directa o simplemente término directo (de dimensión ).
es el vector de salida en el instante k (de dimensión q). Ak, Bk, Ck y Dk son matrices constantes. La matriz Ak se denomina matriz de estado o matriz dinámica (de dimensión ), la matriz Bk se denomina matriz de entrada o matriz de control (de dimensión ), la matriz Ck se denomina matriz de salida o matriz sensora (de dimensión ), y la matriz Dk se denomina matriz de transferencia directa o simplemente término directo (de dimensión ).
Si bien la aproximación en tiempo discreto permite, como se ha visto, resolver (calcular la respuesta) sistemas lineales, éstos, la mayoría de las veces admiten solución analítica, que además es exacta. Sin embargo, los sistemas no lineales no admiten fácilmente una solución analítica, lo cual hace que su resolución se deba hacer de forma aproximada mediante métodos numéricos; en consecuencia, el método aproximado en tiempo discreto es particularmente útil para calcular la respuesta de sistemas no lineales.
Sea pues la expresión genérica de la ecuación de estado de un sistema invariante con el tiempo que puede ser no lineal:
![\[\frac{{d{\bf{x}}\left( t \right)}}{{dt}} = {\bf{f}}\left( {{\bf{x}}\left( t \right),{\bf{u}}\left( t \right)} \right)\,\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-10%282.111%29.png) |
(2.111) |
Si se asume que respecto del vector de control el sistema es lineal, la ecuación anterior puede ser escrita como
![\[\frac{{d{\bf{x}}\left( t \right)}}{{dt}} = {\bf{f}}\left( {{\bf{x}}\left( t \right)} \right)\, + {\bf{Bu}}\left( t \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-11%282.112%29.png) |
(2.112) |
Utilizando la aproximación de derivada en tiempo discreto dada por (2.92).
![\[\frac{{{\bf{x}}\left( {t + T} \right) - {\bf{x}}\left( t \right)}}{T} = {\bf{f}}\left( {{\bf{x}}\left( t \right)} \right)\, + {\bf{Bu}}\left( t \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-12%282.113%29.png) |
(2.113) |
La ecuación anterior puede ser escrita en el instante k (para un periodo de muestreo T) de la forma
![\[\frac{{{\bf{x}}\left( {k + 1} \right) - {\bf{x}}\left( k \right)}}{T} = {\bf{f}}\left( {{\bf{x}}\left( k \right)} \right)\, + {\bf{Bu}}\left( k \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-13%282.114%29.png) |
(2.114) |
Con lo cual, resolviendo para ![\[{\bf{x}}\left( {k + 1} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-14.png) se tiene que
se tiene que
![\[{\bf{x}}\left( {k + 1} \right) = {\bf{x}}\left( k \right) + T\left( {{\bf{f}}\left( {{\bf{x}}\left( k \right)} \right)\, + {\bf{Bu}}\left( k \right)} \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-15.png) |
(2.115) |
Ejemplo 2.13. Respuesta de un sistema no lineal. En el ejemplo 2.2 se dedujo un modelo lineal simple para describir la propagación de una enfermedad epidémica, el cual se reproduce a continuación por comodidad.
![\[\begin{array}{l} {{\dot x}_1}\left( t \right) = - \alpha {x_1}\left( t \right) - \beta {x_2}\left( t \right) + {u_1}\left( t \right) \\ {{\dot x}_2}\left( t \right) = \lambda {x_1}\left( t \right) - \gamma {x_2}\left( t \right) + {u_2}\left( t \right) \\ {{\dot x}_3}\left( t \right) = \alpha {x_1}\left( t \right) + \gamma {x_2}\left( t \right) \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-16%282.116%29.png) |
(2.116) |
El precio que se pagó entonces para hacer lineal el modelo y poderlo tratar en forma matricial, fue el no tener en cuenta la interacción entre las variables población en riesgo de ser infectada y población infectada . Ahora se va a mejorar el modelo teniendo en cuenta esta interacción del modo siguiente:
![\[\begin{array}{l} {{\dot x}_1}\left( t \right) = - \alpha {x_1}\left( t \right) - \beta {x_1}\left( t \right){x_2}\left( t \right) + {u_1}\left( t \right) \\ {{\dot x}_2}\left( t \right) = \beta {x_1}\left( t \right){x_2}\left( t \right) - \gamma {x_2}\left( t \right) + {u_2}\left( t \right) \\ {{\dot x}_3}\left( t \right) = \alpha {x_1}\left( t \right) + \gamma {x_2}\left( t \right) \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-17%282.117%29.png) |
(2.117) |
El modelo (2.116) es no lineal, por tanto no admite un tratamiento matricial como en el Ejemplo 2.12. Sean los parámetros  , con lo cual empleando la ecuación (2.115), el modelo (2.117) se escribirá en modo discreto de la forma
, con lo cual empleando la ecuación (2.115), el modelo (2.117) se escribirá en modo discreto de la forma
![\[\begin{array}{l} {x_1}\left( {k + 1} \right) = {x_1}\left( k \right) + T\left( { - 2{x_1}\left( k \right) - {x_1}\left( k \right){x_2}\left( k \right) + {u_1}\left( k \right)} \right) \\ {x_2}\left( {k + 1} \right) = {x_2}\left( k \right) + T\left( {{x_1}\left( k \right){x_2}\left( k \right) - 2{x_2}\left( k \right) + {u_2}\left( k \right)} \right) \\ {x_3}\left( {k + 1} \right) = {x_3}\left( k \right) + 2T\left( {{x_1}\left( k \right) + {x_2}\left( k \right)} \right) \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-19%282.118%29.png) |
(2.118) |
Sean las condiciones iniciales  ,
, y
y ![\[{x_3}\left( 0 \right) = 0\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-22.png) . Nótese que en un caso real, el valor de estas variables podría estar en cientos o miles de individuos. Del mismo modo, la medida de tiempo podría ser días o meses. Considérese ahora que en el instante inicial hay aporte de individuos a la población infectada, el cual representaremos como
. Nótese que en un caso real, el valor de estas variables podría estar en cientos o miles de individuos. Del mismo modo, la medida de tiempo podría ser días o meses. Considérese ahora que en el instante inicial hay aporte de individuos a la población infectada, el cual representaremos como ![\[{u_2}\left( 0 \right) = 1\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-23.png) (recuérdese que el significado físico de las entradas es velocidad de aporte), pero no hay aporte a la población en riesgo, con lo cual
(recuérdese que el significado físico de las entradas es velocidad de aporte), pero no hay aporte a la población en riesgo, con lo cual  . Por último, asúmase que
. Por último, asúmase que ![\[{u_1}\left( k \right) = 0\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-25.png) ,
,![\[\forall k > 0\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-26.png) y que la entrada
y que la entrada  decae con el tiempo hasta anularse del modo siguiente:
decae con el tiempo hasta anularse del modo siguiente: ![\[{u_2}\left( 1 \right) = 0,5\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-28.png) ; y
; y ![\[{u_2}\left( k \right) = 0\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-29.png) ,
, ![\[\forall k > 1\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-30.png) . Teniendo en cuenta pues las condiciones establecidas, la expresión general del modelo en tiempo discreto para T = 0,1 será
. Teniendo en cuenta pues las condiciones establecidas, la expresión general del modelo en tiempo discreto para T = 0,1 será
![\[\begin{array}{l} {x_1}\left( {k + 1} \right) = 0,8\,{x_1}\left( k \right) - 0,1\,{x_1}\left( k \right){x_2}\left( k \right) \\ {x_2}\left( {k + 1} \right) = 0,8\,{x_2}\left( k \right) + 0,1\,{x_1}\left( k \right){x_2}\left( k \right) + 0,1\,{u_2}\left( k \right) \\ {x_3}\left( {k + 1} \right) = {x_3}\left( k \right) + 0,2\,{x_1}\left( k \right) + 0,2\,{x_2}\left( k \right) \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.2-31%282.119%29.png) |
(2.119) |
A partir de aquí y de modo iterativo se calcula la respuesta para cada instante de tiempo discreto k.
| (2.120) |
El análisis de los sistemas lineales discretos se ve facilitado por el uso de una herramienta matemática denominada transformada ![\[{\rm{Z}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-1.png) , la cual se define a partir de una secuencia de números
, la cual se define a partir de una secuencia de números  del modo siguiente:
del modo siguiente:
![${\rm{Z}}\left[ {x\left( k \right)} \right] = X\left( z \right) = \sum\limits_{k = 0}^\infty {x\left( k \right)} \,{z^{ - k}}$](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-3%282.121%29.png) |
(2.121) |
La transformada definida por la ecuación anterior se denomina unilateral, ya que se considera que sólo está definido para  ; para el caso que esté definido desde
; para el caso que esté definido desde  , se sustituye el índice inferior de la sumatoria de (2.120) por este valor y la transformada es denominada bilateral. La transformada de aplicación a sistemas de tiempo discreto guarda una gran anlogía con la transformada de Laplace de aplicación a los sistemas de tiempo continuo. Así, para condiciones iniciales nulas,
, se sustituye el índice inferior de la sumatoria de (2.120) por este valor y la transformada es denominada bilateral. La transformada de aplicación a sistemas de tiempo discreto guarda una gran anlogía con la transformada de Laplace de aplicación a los sistemas de tiempo continuo. Así, para condiciones iniciales nulas,
![$L\left[ {{\bf{\dot x}}\left( t \right)} \right] = s\,L\left[ {{\bf{x}}\left( t \right)} \right] \Rightarrow {\rm{Z}}\left[ {{\bf{x}}\left( {k + 1} \right)} \right] = z\,{\rm{Z}}\left[ {{\bf{x}}\left( k \right)} \right]$](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-6%282.122%29.png) |
(2.122) |
Teniendo en cuenta esta correspondencia entre sistemas continuos y discretos, se pueden volver a plantear para éstos las mismas metodologías que se aplicaron a los sistemas en tiempo continuo. En concreto: 1) el concepto de función de transferencia discreta por analogía con la función de transferencia continua; 2) la solución de ecuaciones en diferencias por analogía con la solución de ecuaciones diferenciales, y 3) la obtención de la función de transferencia discreta a partir del modelo de estado discreto sin más que cambiar s por z.
En virtud de lo anterior, la función de transferencia de un sistema lineal e invariante en tiempo discreto se define como la relación entre la transformada de la variable de salida y la transformada de la variable de entrada, suponiendo que todas las condiciones iniciales se hacen iguales a cero. Así, dado el sistema de la Figura 2.15, su función de transferencia será:
 |
| Figura 2.15. Sistema de una entrada – una salida (SISO). |
![$F\left( z \right) = {\left. {\frac{{Z\left[ {y\left( k \right)} \right]}}{{Z\left[ {u\left( k \right)} \right]}}} \right|_{\scriptstyle {\rm{Cond}}{\rm{. iniciales}} \hfill \atop \scriptstyle {\rm{nulas}} \hfill}} = \frac{{Y\left( z \right)}}{{X\left( z \right)}}$](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-8%282.123%29.png) |
(2.123) |
Aplicando la ecuación de definición de transformada a las señales de interés, se obtiene la expresión en el dominio z de dichas señales. Así por ejemplo, para el caso de la señal escalón unitario  ,
, , se tendrá que aplicando (2.120),
, se tendrá que aplicando (2.120),
![$U\left( z \right) = Z\left[ {1\left( k \right)} \right] = \sum\limits_{k = 0}^\infty {1\,{z^{ - k}}} = \sum\limits_{k = 0}^\infty {{z^{ - k}} = 1 + } {z^{ - 1}} + {z^{ - 2}} + \cdots $](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-11%282.124%29.png) |
(2.124) |
Utilizando la identidad
| (2.125) |
Se tiene para  que la ecuación (2.124) puede ser escrita como
que la ecuación (2.124) puede ser escrita como
 |
(2.126) |
Al igual que ocurría en el caso de la transformada de Laplace, existen tablas25 [23] de pares de transformadas  que evitan el tedio de tener que aplicar cada vez la expresión (2.126).
que evitan el tedio de tener que aplicar cada vez la expresión (2.126).
Ejemplo 2.14. Función de transferencia de un sistema definido por una ecuación en diferencias. Sea el sistema definido por la ecuación en diferencias siguiente:
 |
(2.127) |
Del mismo modo que en el paso del tiempo continuo al dominio de la transformada de Laplace se aplicó la propiedad de diferenciación real (expresiones (2.40) a (2.41)), ahora, para pasar del tiempo discreto al dominio de la transformada se aplica la propiedad de traslación real en el tiempo:
|
|
(2.128) |
Esto permite transformar la ecuación en diferencias (2.126) en la expresión
![\[X\left( z \right) + 3{z^{ - 1}}X\left( z \right) + 3{z^{ - 2}}X\left( z \right) + {z^{ - 3}}X\left( z \right) = {z^{ - 2}}U\left( z \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-17%281.129%29.png) |
(2.129) |
De aquí,
![\[\frac{{X\left( z \right)}}{{U\left( z \right)}} = \frac{{{z^{ - 2}}}}{{1 + 3{z^{ - 1}} + 3{z^{ - 2}} + {z^{ - 3}}}} = \frac{z}{{{z^3} + 3{z^2} + 3z + 1}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-18%281.130%29.png) |
(2.130) |
Ejemplo 2.15. Resolución de una ecuación en diferencias. Igual que la transformada de Laplace es una herramienta útil para resolver ecuaciones diferenciales lineales, la transformada lo es para resolver ecuaciones en diferencias lineales. Dada pues la ecuación en diferencias (2.130), se trata de obtener la solución para las condiciones: ![\[u\left( 0 \right) = u\left( 1 \right) = 1\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-19.png) ;
;  y
y  .
.
 |
(2.131) |
La transformada del primer miembro de la ecuación anterior se obtiene como en el ejemplo precedente. Respecto de la transformada de la entrada, aplicando la definición de transformada , (2.120):
![\[Z\left[ {u\left( k \right)} \right] = U\left( z \right) = \sum\limits_{k = 0}^\infty {u\left( k \right)} \,{z^{ - k}} = u\left( 0 \right){z^0} + u\left( 1 \right){z^{ - 1}} + u\left( 2 \right){z^{ - 2}} + \cdots = 1 + {z^{ - 1}} = \frac{{z + 1}}{z}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-23%282.132%29.png) |
(2.132) |
La transformada de (2.130) puede ser ya escrita como
![\[X\left( z \right)\left[ {1 - 3{z^{ - 1}} + 3{z^{ - 2}} - {z^{ - 3}}} \right] = \frac{{z + 1}}{z} \Rightarrow \frac{{X\left( z \right)}}{z} = \frac{{{z^2} + z}}{{{z^3} - 3{z^2} + 3z - 1}} = \frac{{{z^2} + z}}{{{{\left( {z - 1} \right)}^3}}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-24%282.133%29.png) |
(2.133) |
Un poco más adelante se verá por qué interesa despejar la variable a calcular dividida por z. Ahora, al igual que se procedía para la transformada de Laplace, se descompone la relación de polinomios en fracciones simples. Nótese que la raíz del denominador (polo) es de multiplicidad 3.
![\[\frac{{X\left( z \right)}}{z} = \frac{{{z^2} + z}}{{{{\left( {z - 1} \right)}^3}}} = \frac{A}{{z - 1}} + \frac{B}{{{{\left( {z - 1} \right)}^2}}} + \frac{C}{{{{\left( {z - 1} \right)}^3}}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-25%282.134%29.png) |
(2.134) |
Para el cálculo de C se puede proceder como en el caso cuando no hay polos múltiples, esto es, multiplicando ambos miembros de esta última ecuación por  se tiene que
se tiene que
![\[{\left( {z - 1} \right)^3}\frac{{{z^2} + z}}{{{{\left( {z - 1} \right)}^3}}} = A{\left( {z - 1} \right)^2} + B\left( {z - 1} \right) + C\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-27%282.135%29.png) |
(2.135) |
A partir de aquí basta con sustituir el valor del polo para calcular C:
![\[C = {\left. {{z^2} + z} \right|_{z = 1}} = 2\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-28%282.136%29.png) |
(2.136) |
El resto de términos no pueden ser calculados de la misma forma. Una opción que dependiendo del caso puede ser algo tediosa, es sustituir el valor calculado de C en (2.134) e identificar los términos en las potencias de z:
![\[{z^2} + z = A{\left( {z - 1} \right)^2} + B\left( {z - 1} \right) + 2 = A{z^2} - 2Az + A + Bz - B + 2\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-29%282.137%29.png) |
(2.137) |
Del término en  se deduce que A=1. Del término independiente,
se deduce que A=1. Del término independiente,  , se deduce que B=3 Al mismo resultado podríamos haber llegado de una forma más sistemática elimi-nando de forma sucesiva el índice de multiplicidad del polo, esto es, derivando cada vez respecto de z ambos miembros de (2.136):
, se deduce que B=3 Al mismo resultado podríamos haber llegado de una forma más sistemática elimi-nando de forma sucesiva el índice de multiplicidad del polo, esto es, derivando cada vez respecto de z ambos miembros de (2.136):
 |
(2.138) |
Esto es,
![\[2z + 1 = 2A\left( {z - 1} \right) + B\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-33%282.139%29.png) |
(2.139) |
Sustituyendo en la ecuación anterior el valor del polo z=1 se tiene de nuevo que B=3 Por último, derivando ahora (2.138) respecto de z se obtiene que A=1.
En definitiva, la expresión (2.133) puede ser escrita en forma de fracciones simples del modo siguiente:
![\[\frac{{X\left( z \right)}}{z} = \frac{1}{{z - 1}} + \frac{3}{{{{\left( {z - 1} \right)}^2}}} + \frac{2}{{{{\left( {z - 1} \right)}^3}}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-34%282.140%29.png) |
(2.140) |
A partir de aquí se escribe la expresión anterior en la forma como aparecen los términos en las tablas de transformadas, esto es, en potencias de z-1,
 |
(2.141) |
Aplicando la transformada z inversa26 [24], z-1, a la ecuación anterior sabiendo que
![\[Z\left[ {1\left( k \right)} \right] = \frac{1}{{1 - {z^{ - 1}}}}{\rm{, }}Z\left[ {kT} \right]{\rm{ = }}\frac{{T{z^{ - 1}}}}{{{{\left( {1 - {z^{ - 1}}} \right)}^2}}}{\rm{ y }}Z\left[ {\frac{{k\left( {k - 1} \right) \cdots \left( {k - m + 2} \right)}}{{\left( {m - 1} \right){\rm{!}}}}} \right] = \frac{{{z^{ - m + 1}}}}{{{{\left( {1 - {z^{ - 1}}} \right)}^m}}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-36%282.142%29.png) |
(2.142) |
Se obtiene la solución de (2.126):
![\[x\left( k \right) = 1\left( k \right) + 3k + 2\frac{{k\left( {k - 1} \right)}}{{2{\rm{!}}}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-37%282.143%29.png) |
(2.143) |
Para los primeros 3 muestreos se tiene que
![\[\begin{array}{*{20}{c}} {x\left( 0 \right) = 1\left( 0 \right) = 1} \hfill \\ {x\left( 1 \right) = 1\left( 1 \right) + 3\,.1 = 4} \hfill \\ {x\left( 2 \right) = 1\left( 2 \right) + 3\,.\,2\, + 2\frac{{2\,.1}}{{2{\rm{!}}}} = 9} \hfill \\ {x\left( 3 \right) = 1\left( 3 \right) + 3\,.\,3\, + 2\frac{{3\,.\,2}}{{2{\rm{!}}}} = 16} \hfill \\ \end{array}\,\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-38%282.144%29.png) |
(2.144) |
La ecuación en diferencias (2.126) podría haber sido resuelta también de forma iterativa como en el ejemplo 2.10, esto es:
![\[\begin{array}{*{20}{c}} {x\left( 0 \right) = u\left( 0 \right) = 1} \hfill \\ {x\left( 1 \right) = u\left( 1 \right) + 3x\left( 0 \right) = 4} \hfill \\ {x\left( 2 \right) = 3x\left( 1 \right) - 3x\left( 0 \right) = 9} \hfill \\ {x\left( 3 \right) = 3x\left( 2 \right) - 3x\left( 1 \right) + x\left( 0 \right) = 16} \hfill \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-39%282.145%29.png) |
(2.145) |
Obtención de la función de transferencia a partir del modelo de estado
Vamos a ver a continuación como la forma de obtener la función de transferencia discreta de un sistema de una única entrada y una única salida (SISO), definido por su modelo discreto de estado, es análoga al caso continuo. Sea pues el modelo discreto de estado:
 |
(2.146) |
Aplicando la transformada z (2.121) a la ecuación de estado y a la ecuación de salida anteriores, se tiene que
![\[\begin{array}{l} z{\bf{X}}\left( z \right) = {\bf{AX}}\left( z \right) + {\bf{B}}U\left( z \right) \\ Y\left( z \right) = {\bf{CX}}\left( z \right) + {\bf{D}}U\left( z \right) \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-41%282.147%29.png) |
(2.147) |
Donde B es una matriz de orden nx1 debido a que el sistema tiene una única entrada u. Obsérvese que no se tienen en cuenta las condiciones iniciales, ya que lo que se busca es una función de transferencia. A partir de aquí, procediendo de forma análoga al caso continuo (ecuaciones (2.54) a (2.56)), se llega a la expresión que permite obtener de forma directa la función de transferencia de un modelo de estado discreto lineal de una entrada y una salida (SISO).
![\[G\left( z \right) = {{\bf{C}}_{\bf{k}}}{\bf{\Phi }}\left( z \right){{\bf{B}}_{\bf{k}}} + {{\bf{D}}_{\bf{k}}}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-42%282.148%29.png) |
(2.148) |
Donde
 |
(2.149) |
De nuevo, como en el caso continuo, queda claro que el polinomio denominador de la función de transferencia es  . Esto es, los polos del sistema coinciden con los valores propios o autovalores de la matriz Ak. En conclusión, los polos del sistema dependen sólo de la matriz Ak, mientras que los ceros dependen de las matrices Ak, Bk, Ck y Dk.
. Esto es, los polos del sistema coinciden con los valores propios o autovalores de la matriz Ak. En conclusión, los polos del sistema dependen sólo de la matriz Ak, mientras que los ceros dependen de las matrices Ak, Bk, Ck y Dk.
Dada una función f, se dice que es lineal si cumple que ![\[\left. 1 \right)f\left( {u,v} \right) = f\left( u \right) + f\left( v \right){\rm{ y }}\left. 2 \right)f\left( {ku} \right) = kf\left( u \right),\]](/antonio.barragan/files/archivos_usuarios/78/form2.1-12.png) donde k es un escalar.
donde k es un escalar.
El matemático y físico Joseph Louis Lagrange (1736–1813), dijo que Newton fue el más grande genio que ha existido y también el más afortunado dado que sólo se puede encontrar una vez un sistema que rija el mundo.
Para muchos y aunque de muy difícil lectura, la obra más importante que registra hasta ahora la historia de la ciencia.
Quizás el único fallo que tenía la teoría de Newton (y él era consciente de ello) era que las fuerzas que se ejercían entre los cuerpos a distancia operaban de forma instantánea. Aún así, las ideas newtonianas fueron parte del programa de todo investigador en el campo de la física teórica hasta finales del siglo XIX. No fue hasta la teoría del campo electromagnético promulgada por Maxwell cuando se comprendió con claridad que las interacciones eléctricas y magnéticas entre los cuerpos no eran debidas a fuerzas que operaran de modo instantáneo y a distancia, sino a procesos que se propagaban a través del espacio a una velocidad finita. El terreno estaba ya preparado y las aportaciones de Mach, Poincaré y Lorentz, desembocaron en la Teoría de la Relatividad Restringida de Albert Einstein en la que, al abandonarse la noción de absoluta simultaneidad se excluía la existencia de fuerzas que actúan instantáneamente a dis-tancia. El espacio y también el tiempo, quedaban despojados de su capacidad causal absoluta y pasaron a ser entes afectados por las masas del Universo en estrecha relación, ahora, con la energía. La teoría General de la Relatividad, la nueva teoría de la gravitación, sustituiría a la gravitación newtoniana. Las leyes del movimiento de Newton sólo son válidas para pequeñas distancias, las del sistema solar, y para pequeñas velocidades, que ahora también tienen un límite, el de la velocidad de la luz.
Un sistema puede tener más de una entrada; imagínese por ejemplo un barco con más de un motor actuando a la vez para moverlo.
Para un modelo no lineal siempre se podrá linealizar en torno al punto de operación.
Para un sistema variante con el tiempo se escribiría 
Para el caso general de una función de n variables  su desarrollo en serie de Taylor puede encontrarse en textos matemáticos y direcciones de Internet. Véase por ejemplo: http://es.wikipedia.org/wiki/Serie_de_Taylor [25]
su desarrollo en serie de Taylor puede encontrarse en textos matemáticos y direcciones de Internet. Véase por ejemplo: http://es.wikipedia.org/wiki/Serie_de_Taylor [25]
Pierre-Simon Laplace (Beaumont-en-Auge (Normandía); 23 de marzo de 1749 - París; 5 de marzo de 1827) astrónomo, físico y matemático francés que inventó y desarrolló, entre otras cosas, la transformada de Laplace. La Transformada de Laplace de una función f(t) para todos los números reales t ≥ 0, es la función definida por:  . Donde s es una variable compleja y
. Donde s es una variable compleja y  . Esta transformada integral tiene una serie de propiedades que la hacen útil en el análisis de sistemas lineales. Una de las ventajas más significativas radica en que la integración y derivación se convierten en multiplicación y división. Esto transforma las ecuaciones diferenciales e integrales en ecuaciones polinómicas, mucho más fáciles de resolver. El modo de operar consiste en transformar por la integral la función f(t) en la función F(s), para lo cual en la práctica se utilizan tablas de transformadas. Éstas pueden ser encontradas en textos y direcciones de Internet. Véase por ejemplo: http://es.wikipedia.org/wiki/Transformada_de_Laplace [26].
. Esta transformada integral tiene una serie de propiedades que la hacen útil en el análisis de sistemas lineales. Una de las ventajas más significativas radica en que la integración y derivación se convierten en multiplicación y división. Esto transforma las ecuaciones diferenciales e integrales en ecuaciones polinómicas, mucho más fáciles de resolver. El modo de operar consiste en transformar por la integral la función f(t) en la función F(s), para lo cual en la práctica se utilizan tablas de transformadas. Éstas pueden ser encontradas en textos y direcciones de Internet. Véase por ejemplo: http://es.wikipedia.org/wiki/Transformada_de_Laplace [26].
La transformada inversa de Laplace permite encontrar la función del tiempo f(t) a partir de la transformada de Laplace F(s): ![${L^{ - 1}}\left[ {F\left( s \right)} \right] = \int_{\sigma - j\infty }^{\sigma + j\infty } {F\left( s \right){e^{st}}} ds,{\rm{ para }}t > 0$](/antonio.barragan/files/archivos_usuarios/78/form2.3-8_0.png) Donde
Donde  es una constante real.
es una constante real.
La instrucción de MATLAB laplace devuelve la función de s correspondiente a una función de t.
Para el caso de que la expresión a desarrollar contenga polos múltiples del tipo  ver ejemplo 2.15. El caso general puede ser consultado en textos y direcciones de Internet. Véase por ejemplo: http://www.scribd.com/doc/6075394/DescomposiciOn-Fracciones-Parciales [27]. La función de MATLAB residue realiza la expansión en fracciones parciales de la relación de dos polinomios B(s)/A(s).
ver ejemplo 2.15. El caso general puede ser consultado en textos y direcciones de Internet. Véase por ejemplo: http://www.scribd.com/doc/6075394/DescomposiciOn-Fracciones-Parciales [27]. La función de MATLAB residue realiza la expansión en fracciones parciales de la relación de dos polinomios B(s)/A(s).
La función de MATLAB ilaplace calcula la transformada inversa de Laplace.
Raíces del polinomio denominador de la función de transferencia.
Raíces del polinomio numerador de la función de transferencia.
La operación matemática  se denomina convolución
se denomina convolución
Salvo para cálculos sencillos de lápiz y papel, la matriz de transición de estado no se suele calcular por el procedimiento de este ejemplo, esto es, invirtiendo la matriz para pasar después al dominio del tiempo. Existen métodos analíticos, como el de interpolación de Sylvester por ejemplo, que permiten calcular la matriz de transición de estado en su forma exponencial  de modo directo.
de modo directo.
El proceso de conversión A/D tiene tres etapas perfectamente diferenciadas, a saber: muestreo, cuantificación y codificación. Nótese que la señal muestreada no contiene errores para los instantes de muestreo, ya que en ellos el valor capturado es análogo al de la señal original. Sin embargo, el proceso siguiente al muestreo, cuantificación, atribuye un valor finito (discreto) de amplitud a la señal muestreada, seleccionado por aproximación dentro de un margen de niveles previamente fijado, lo cual introduce en el proceso un error denominado error de cuantificación. Por último, la etapa de codificación traduce el valor finito cuantificado en una sucesión de ceros y unos que corresponde al valor binario de la señal muestreada. Esta palabra digital correspondiente al valor analógico inicial es la que ya puede entender el computador. Imaginemos como ejemplo un convertidor A/D de 3 bits (8 palabras digitales de salida, de 000 a 111) cuyo margen de entrada es 5 V (5/8 = 0,625 V). Si a la entrada del convertidor llega un muestreo de 0,600 V, el valor asignado en la cuantificación será 0 V, el error de cuantificación cometido 0,6 V y la palabra digi-tal de salida 000.
En casos muy concretos donde la velocidad sea un factor determinante se puede implementar mediante hardware.
Un algoritmo es un procedimiento que puede llevar a una solución aproximada de un problema mediante un número finito de pasos que pueden ejecutarse de manera lógica.
Existen dos restricciones prácticas: 1) La consideración tiempo de muestreo menor implica mayor precisión llega un momento que se satura y deja de ser cierta, debido fundamentalmente a la propia precisión de cálculo del computador, y 2) Siempre es deseable llegar a un compromiso entre esfuerzo de cómputo o coste computacional y precisión.
Los métodos de Runge-Kutta son una familia de métodos iterativos para aproximar las soluciones de ecuaciones diferenciales ordinarias. Estas técnicas fueron desarrolladas alrededor de 1900 por los matemáticos alemanes Carl David Tolmé Runge y Martin Wilhelm Kutta.
En honor de su inventor, Leonhard Paul Euler. Matemático y físico que nació el 15 de abril de 1707 en Basilea (Suiza) y murió el 18 de septiembre de 1783 en San Petersburgo (Rusia). Es considerado el matemático principal del siglo XVIII y uno de los más grandes de todos los tiempos.
Para saber más ver por ejemplo http://es.wikipedia.org/wiki/Frecuencia_de_muestreo [28]
Para pares de transformadas, propiedades y, en general, para saber más sobre la transformada , véase por ejemplo http://es.wikipedia.org/wiki/Transformada_Z [29] La función de MATLAB ztrans permite calcular la transformada z de una secuencia.
La función de MATLAB iztrans calcula la transformada z inversa.
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()
Enlaces:
[1] http://uhu.es/antonio.barragan/content/1-0
[2] http://uhu.es/antonio.barragan/content/2-0
[3] http://uhu.es/antonio.barragan/content/3-0
[4] http://uhu.es/antonio.barragan/content/4-0
[5] http://uhu.es/antonio.barragan/content/5-0
[6] http://uhu.es/antonio.barragan/content/6-0
[7] http://uhu.es/antonio.barragan/content/7-0
[8] http://uhu.es/antonio.barragan/content/8-0
[9] http://uhu.es/antonio.barragan/content/9-0
[10] http://uhu.es/antonio.barragan/content/10-0
[11] http://uhu.es/antonio.barragan/content/11-0
[12] http://uhu.es/antonio.barragan/content/12-0
[13] http://uhu.es/antonio.barragan/content/13-0
[14] http://uhu.es/antonio.barragan/content/14-0
[15] http://uhu.es/antonio.barragan/content/15-0
[16] http://uhu.es/antonio.barragan/content/17-0
[17] http://uhu.es/antonio.barragan/content/18-0
[18] http://uhu.es/antonio.barragan/content/20-0
[19] http://uhu.es/antonio.barragan/content/21-0
[20] http://uhu.es/antonio.barragan/content/22
[21] http://uhu.es/antonio.barragan/content/23
[22] http://uhu.es/antonio.barragan/content/24
[23] http://uhu.es/antonio.barragan/content/25
[24] http://uhu.es/antonio.barragan/content/26
[25] http://es.wikipedia.org/wiki/Serie_de_Taylor
[26] http://es.wikipedia.org/wiki/Transformada_de_Laplace
[27] http://www.scribd.com/doc/6075394/DescomposiciOn-Fracciones-Parciales
[28] http://es.wikipedia.org/wiki/Frecuencia_de_muestreo
[29] http://es.wikipedia.org/wiki/Transformada_Z
![\[\frac{{{d^n}y\left( t \right)}}{{d{t^n}}} + {a_1}\frac{{{d^{n - 1}}y\left( t \right)}}{{d{t^{n - 1}}}} + \ldots + {a_{n - 1}}\frac{{dy\left( t \right)}}{{dt}} + {a_n}y\left( t \right) = u\left( t \right),\,\,\,\,\,\]](/antonio.barragan/files/archivos_usuarios/78/form2.1.2-48%282.10%29.png)







![\[Z\left[ {x\left( {k + n} \right)} \right] = {z^n}\left[ {Z\left[ {x\left( k \right)} \right] - \sum\limits_{k = 0}^{n - 1} {x\left( k \right){z^{ - k}}} } \right]{\rm{ }}\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-16%281.128%29.png) y
y![\[Z\left[ {x\left( {k - n} \right)} \right] = {z^{ - n}}\,Z\left[ {x\left( k \right)} \right]\]](/antonio.barragan/files/archivos_usuarios/78/form2.6.2-16%281.128%29b.png)