Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
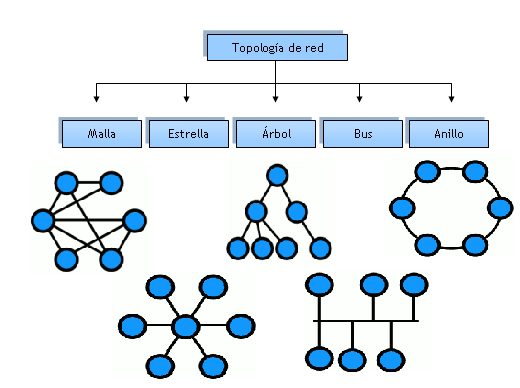
5.TOPOLOGÍAS
7 May, 2012 - 17:47 — maria.estan
 Versión para imprimir
Versión para imprimir
Introducción
El término topología se refiere a la forma en que está diseñada la red, bien físicamente (rigiéndose de algunas características en su hardware) o bien lógicamente (basándose en las características internas de su software).
Las redes Ethernet a menudo están formadas por múltiples segmentos individuales interconectados por repetidores. Los segmentos están interconectados entre si siguiendo lo que se denomina un patrón. Cada segmento Ethernet es una rama individual de la red completa.
La topología de red es la representación geométrica de la relación entre todos las ramas y los dispositivos que los enlazan entre sí (habitualmente denominados nodos).
Para el día de hoy, existen al menos cinco posibles topologías de red básicas: malla, estrella, árbol, bus y anillo. Sin embargo en la red Ethernet solo utilizamos la topología estrella y bus.
Topología Bus
Una topología en bus es multipunto. Un cable largo actúa como una red troncal que conecta todos los dispositivos en la red. Este cable provee un camino para las señales eléctricas que es común para todos los dispositivos conectados y transporta todas las transmisiones entre los dispositivos.

Los nodos se conectan al bus mediante cables de conexión (latiguillos) y sondas. Un cable de conexión es una conexión que va desde el dispositivo al cable principal. Una sonda es un conector que, o bien se conecta al cable principal, o se pincha en el cable para crear un contacto con el núcleo metálico.
Entre las ventajas de la topología de bus se incluye la sencillez de instalación. El cable troncal puede tenderse por el camino más eficiente y, después, los nodos se pueden conectar al mismo mediante líneas de conexión de longitud variable. De esta forma se puede conseguir que un bus use menos cable que una malla, una estrella o una topología en árbol. Un problema asociado con el diseño bus de cableado es que un fallo en cualquier parte del cable va a interrumpir el camino eléctrico. Como resultado, la operación de todos los dispositivos conectados será interrumpida.
Los dispositivos conectados a un segmento de cable siguen una topología conocida como cadena tipo margarita. En esta topología, un cable conectado a un conector T BNC en un dispositivo es conectado a otro conector T en el siguiente dispositivo y así sucesivamente. Los conectores T que se encuentran en los extremos opuestos del segmento son terminales. Si cualquier cable es removido incorrectamente del conector T, todo el segmento queda sin funcionar para todos los dispositivos conectados. Si el conector T es removido de la interfaz de red Ethernet, el segmento continúa funcionando, ya que la continuidad del cable coaxial no ha sido interrumpida.
También es posible tener segmentos punto a punto en un ambiente de cable delgado. Utilizando un repetidor multipuerto se puede conectar un segmento en forma directa a un dispositivo. Esto limita el número de dispositivos que pueden ser afectados por el daño a un cable específico.
Topologia Arbol
Es una topología de red en la que los nodos están colocados en forma de árbol. Desde una visión topológica, la conexión en árbol es parecida a una serie de redes en estrella interconectadas salvo en que no tiene un nodo central. En cambio, tiene un nodo de enlace troncal, generalmente ocupado por un hub o switch, desde el que se ramifican los demás nodos, al que hay conectar las redes individuales en bus. Por lo tanto árbol combina características de la topología de estrella con la de bus.
En esta topología podemos encontrarnos ventajas como la facilidad de crecimiento de la red, sin embargo, existen desventajas como que su configuración es más complicada y que si falla el segmento principal toda la red queda inutilizada.

Topología Estrella
En la topología en estrella cada dispositivo solamente tiene un enlace punto a punto dedicado con el controlador central, habitualmente llamado concentrador. Los dispositivos no están directamente enlazados entre sí, sino a un concentrador o hub central, formando un segmento. Las señales de cada dispositivo conectado son enviadas al hub y luego difundidas a todos los otros dispositivos conectados. Este diseño permite a Ethernet operar lógicamente como un bus, pero físicamente el bus solo existe en el hub.
A diferencia de otras topologías, la topología en estrella no permite el tráfico directo de dispositivos. El controlador actúa como un intercambiador, si un dispositivo quiere enviar datos a otro, envía los datos al controlador, que los retransmite al dispositivo final.
El controlador usa mecanismos de filtrado y conmutación muy similares a los utilizados por las puertas de enlace, Inspecciona las direcciones de origen y destino de los mensajes, genera una tabla que le permite saber qué equipo se conecta a qué puerto del controlador (en general este proceso se hace por auto aprendizaje, es decir, de manera automática pero el administrador del controlador puede realizar ajustes adicionales).
Al conocer el puerto receptor, el controlador sólo transmitirá el mensaje al puerto adecuado mientras que los otros puertos permanecerán libres para otras transmisiones que pueden ser realizadas simultáneamente.
Como resultado, cada intercambio puede llevarse a cabo a una velocidad nominal (mayor división de ancho de banda), sin colisiones y con un aumento considerable en el ancho de banda de la red (también a una velocidad nominal).
El correcto funcionamiento de la comunicación requiere que el tiempo de ida y vuelta entre dos estaciones cualesquiera de la red no supere el tiempo que tarda en emitirse la trama mínima permitida. Este tiempo, que depende de la velocidad de la red, fija a su vez unas distancias máximas entre las estaciones. Estos cuatro parámetros (velocidad de la red, tamaño de trama mínimo, tiempo de ida y vuelta y distancia máxima) están relacionados entre sí, como se muestra en la tabla siguiente:

Las distancias indicadas en la tabla son el caso óptimo; en la práctica la distancia depende de múltiples factores, como el número de repetidores intermedios o el tipo de cable utilizado. La comprobación última de que una determinada topología de red es válida sería medir o calcular el tiempo de ida y vuelta entre cada posible par de estaciones de la red para comprobar que es inferior al que aparece en la tabla.
El estándar IEEE 802.3 establece dos formas de verificar que una determinada topología Ethernet es válida. La primera, denominada Modelo 1, corresponde a un conjunto de reglas 'enlatadas' sobre la distancia máxima y el número máximo de repetidores que puede haber entre dos estaciones.
Cumpliendo esas reglas el usuario se asegura de que su red no excede los valores máximos en el tiempo de ida y vuelta. Ahora bien, el Modelo 1 adopta una actitud conservadora y presupone las longitudes máximas en el enlace del usuario final. Si éste no esta utilizando la longitud máxima es posible aumentar la distancia en los enlaces intermedios. En este caso hay que verificar la topología siguiendo el Modelo 2, que consiste en realizar cálculos detallados del retardo para cada componente y para cada tramo de cable en cada trayecto. Una topología en principio inaceptable según el Modelo 1 puede resultar válida aplicando las reglas del Modelo 2.
Con respecto a saber si todos los puertos pueden comunicarse al mismo tiempo sin perder los mensajes, eso es algo que depende de la calidad del controlador (non blocking switch). Los controladores posibilitan evitar colisiones y la mayoría de los modernos permiten desactivar la detección y cambiar a modo full dúplex (bidireccional) en los puertos. De esta forma, los equipos pueden transmitir y recibir al mismo tiempo, lo que también contribuye al rendimiento de la red.
El modo full dúplex es interesante, en especial, para los servidores que poseen muchos clientes.
Los controladores Ethernet modernos también detectan la velocidad de transmisión que cada equipo utiliza (autosensing) y si el equipo admite varias velocidades (10, 100 o 1000 megabits/seg.) comienza a negociar con él para seleccionar tanto una velocidad como el modo de transmisión: semi dúplex o full dúplex. Esto permite contar con un almacenamiento de equipos con distintos rendimientos (por ejemplo, un conjunto de equipos con varias configuraciones hardware).
Como el tráfico transmitido y recibido ya no se transmite a todos los puertos, se hace más difícil rastrear lo que está pasando. Esto contribuye a la seguridad general de la red, que es un tema de suma importancia en la actualidad.

La topología estrella simplifica la administración de la red y la resolución de problemas ya que cada tramo de cable conecta solo dos dispositivos, una a cada extremo del cable. Si un dispositivo no puede comunicarse exitosamente con en la red, puede ser movido físicamente a otra ubicación para establecer si la falla reside en el cableado o en el dispositivo. Este tipo de aislamiento es mucho más difícil en las topologías bus.
Una topología en estrella es más barata, ya que, cada dispositivo necesita solamente un enlace y un puerto de entrada/salida para conectarse a cualquier número de dispositivos.
Este factor hace que también sea más fácil de instalar y reconfigurar. Además, es necesario instalar menos cables, y la conexión, desconexión y traslado de dispositivos afecta solamente a una conexión: la que existe entre el dispositivo y el concentrador.
Actualmente la topología física recomendada para las instalaciones es la topología estrella como se especifica en ANSI/TIA/EIA-568-A. La utilización de una topología estrella ha permitido limitar las interrupciones en la red causadas por problemas de cableado.
Por último, el uso de conmutadores hace posible la construcción de redes geográficamente más grandes. La distancia ya no es limitada, excepto por los límites técnicos del medio utilizado (fibra óptica o par trenzado, la potencia de la señal transmitida y la sensibilidad del receptor, etcétera).
Por lo tanto llegamos a la conclusión de que la topología física de una red Ethernet está basada en estrella, mientras que la topología lógica sigue siendo basada en bus, aprovechando las ventajas de ambas topologías.
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()