Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
3.2.3 Versión DP-V2
3 June, 2012 - 16:28 — javier.remesal
 Versión para imprimir
Versión para imprimir
Comunicación de esclavo a esclavo (DXB)
Esta función habilita la comunicación directa y de ahorro de tiempo entre los esclavos usando comunicaciones de difusión sin desviarse a través del maestro. En este caso el esclavo actúa como “publicador”, es decir, la respuesta del esclavo no pasa por el maestro coordinador, sino directamente a los demás esclavos involucrados en la secuencia, los llamados “subscriptores” (ver la figura 15). Esto permite a los esclavos leer datos directamente desde otros esclavos y usarlos como entradas propias. Esto abre nuevas posibilidades de aplicaciones, además de reducir los tiempos de respuesta en el bus hasta un 90%.
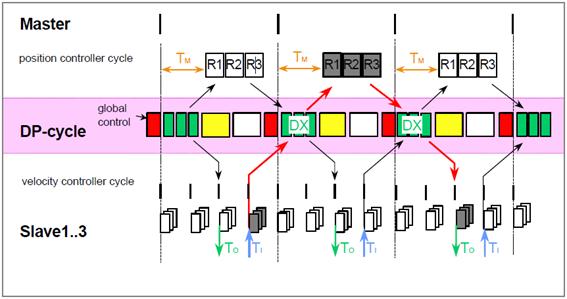
Modo isócrono
Esta función habilita el control de reloj síncrono en el maestro y los esclavos, con independencia de la caga del bus. Esta función permite procesos de posicionamiento de alta precisión con una desviación de reloj de menos de un microsegundo. Todos los ciclos de los dispositivos participantes están sincronizados al ciclo del maestro del bus a través de un mensaje de difusión de “control global”. Una señal especial de vida (número consecutivo) permite monitorizar la sincronización. La figura 14 muestra los tiempos disponibles para el intercambio de datos (DX, verde), acceso de un maestro de clase 2 (amarillo) y reserva (blanco). La flecha roja identifica la ruta desde la adquisición de datos actual (TI) pasando por el control (RX) hasta la referencia de la salida de datos (TO), el cual generalmente emplea dos ciclos de bus.
Control del reloj
Esta función sincroniza todas las estaciones al tiempo del sistema con una desviación de menos de un milisegundo (un maestro en tiempo real envía una marca de tiempo a todos los esclavos sobre el nuevo servicio MS3 sin conexión). Esto permite el seguimiento con precisión de eventos. Esto es particularmente útil para la adquisición de funciones de tiempo en redes con numerosos maestros. Esto facilita el diagnóstico de fallos así como la planificación cronológica de eventos.
Carga y descarga (Zona de carga)
Esta función permite la carga de datos de cualquier tamaño en un dispositivo de campo con unos pocos comandos. Esto permite, por ejemplo, que los programas sean actualizados o que los dispositivos sean remplazados sin necesidad de procesos de carga manuales.
Invocación de funciones
El servicio de invocación de funciones permite controlar (iniciar, parar, devolver, reiniciar) programas o llamadas a funciones (por ejemplo la adquisición de valores medidos) en un esclavo DP.
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()