Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
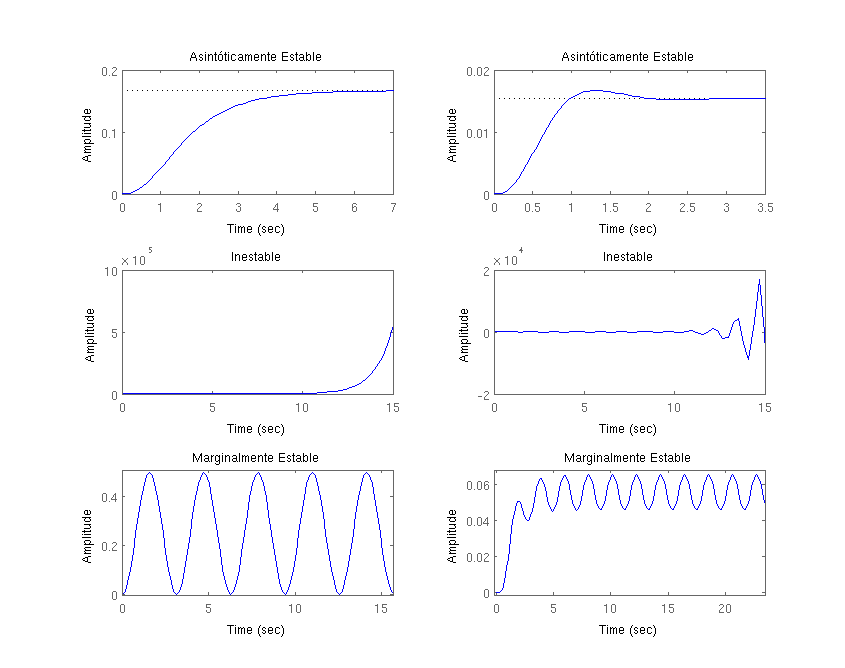
Ejemplos de sistemas asintóticamente estables, marginalmente estables e inestables
19 May, 2008 - 20:25 — Javier Barragán
 Versión para imprimir
Versión para imprimir
subplot(321)
Polos=[-1,-2,-3]; % TODOS tienen parte real negativa => Sistema Asintóticamente Estable
G=zpk([],Polos,1); step(G),title('Asintóticamente Estable')
subplot(322)
Polos=[-5,-2+3j,-2-3j]; % TODOS tienen parte real negativa => Sistema Asintóticamente Estable
G=zpk([],Polos,1); step(G),title('Asintóticamente Estable')
subplot(323)
Polos=[-1,-2,1]; % Uno tiene parte real positiva => Sistema inestable
G=zpk([],Polos,1); step(G),title('Inestable')
subplot(324)
Polos=[-1,1+5j,1-5j]; % El complejo tiene parte real positiva => Inestable (oscilando)
G=zpk([],Polos,1); step(G),title('Inestable')
subplot(325)
Polos=[2j,-2j]; % Un complejo conjugado puro (parte real 0) => Marginalmente Estable (oscilador lineal)
G=zpk([],Polos,1);step(G),title('Marginalmente Estable')
subplot(326)
Polos=[-1,-2,3j,-3j]; % Un complejo conjugado puro (parte real 0) y el resto con parte real negativa => Marginalmente Estable
G=zpk([],Polos,1); step(G),title('Marginalmente Estable')
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()