Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
Revisión de ejercicio propuesto 1 de 13 May, 2008 - 01:39
10 May, 2008 - 13:08 — damian.spata
 Versión para imprimir
Versión para imprimir
PROBLEMA PROPUESTO:
Sacar la función de transferencia y estudiar los distintos sistemas de segundo orden en función del factor de amortiguamiento del siguiente circuito:
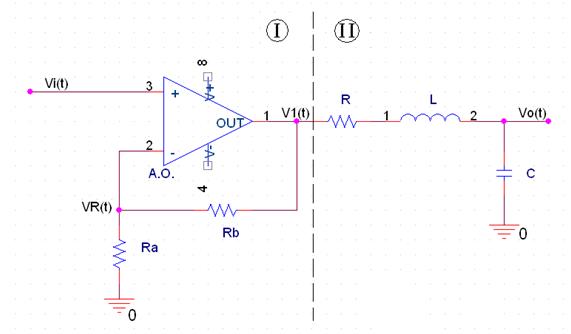
Ht(s) = H1 (s) * H2(s)
Etapa (I) Amplificador no inversor, esta etapa es la encargada de introducir ganancia en el circuito.
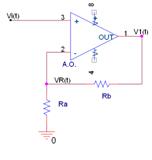
$H1(t) = \frac{{V1(t)}}{{Vi(t)}} = 1 + \frac{{Rb}}{{Ra}}$ ---> ${\rm{VR(t) = }}\frac{{{\rm{Ra}}}}{{{\rm{Ra + Rb}}}}V1(t)$
Vi(t)=VR(t)
${\rm{Vi(t) = }}\frac{{{\rm{Ra}}}}{{{\rm{Ra + Rb}}}}V1(t)$ ---> ${\rm{H1(s) = }}\frac{{V1(s)}}{{Vi(s)}} = \frac{{{\rm{Ra}}}}{{{\rm{Ra + Rb}}}} = 1 + \frac{{Rb}}{{Ra}}$
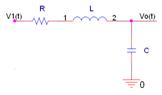
Etapa (II),circuito RLC:
 ------->
-------> 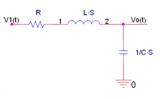
${\rm{H2(s) = }}\frac{{Vo(s)}}{{V1(s)}}$ ----> $Vo(s) = \frac{{\frac{1}{{Cs}}}}{{R + Ls + \frac{1}{{Cs}}}}V1(s)$
$Vo(s) = \frac{{\frac{1}{{Cs}}}}{{\frac{{CRs+CLs^2+1}}{{Cs}}}}V1(s)$ ----> $Vo(s) = \frac{1}{{CRs+CLs^2+1}}V1(s)$
$Vo(s) = \frac{{\frac{1}{{LC}}}}{{\frac{{Rs}}{L}+s^2+\frac{1}{{LC}}}}V1(s) $ -----> $Vo(s) = \frac{{\frac{1}{{LC}}}}{{s^2+\frac{{Rs}}{L}+\frac{1}{{LC}}}}V1(s)$
Etapa (I) y etapa (II): H t(s) = H1(s) * H2(s)
${Ht(s) = }}\frac{{V1(s)}}{{V1(s)}}\frac{{{\rm{Vo(s)}}}}{{{\rm{V1(s)}}}} = (\frac{{Ra}}{{Ra+Rb}})\frac{{\frac{1}{{Ls}}}}{{\frac{{Rs}}{L}+s^2+\frac{{1}}{{LC}}}}$
Función transferencia de 2º orden :
$Ht(s) = \frac{{\frac{1}{{Ls}}(1+\frac{{Rb}}{{Ra}})}}{{\frac{{Rs}}{L}+s^2+\frac{1}{{LC}}}}$ ------> $\approx Ht(s) =\frac{{Ko \cdot Wn^2}}{{s^2+2\cdot\delta\cdot Wn \cdot s+Wn^2 }}$
$Wn = \frac{1}{{\sqrt {LC} }}$ $ 2 \cdot \delta \cdot Wn = \frac{R}{L}$ $\delta= \frac{{\frac{R}{L}}}{{\frac{2}{{\sqrt {LC} }}}}$
Coeficiente de amortiguamiento: $\delta= \sqrt {\frac{{R^2 C}}{{4L}}} $
· Sistema Sobreamortiguado: $\delta > 1$ ----> $\delta= \sqrt {\frac{{R^2 C}}{{4L}}} > 1$
· Sistema Críticamente amortiguado: $\delta = 1$ ----> $\delta= \sqrt {\frac{{R^2 C}}{{4L}}} = 1$
· Sistema Subamortiguado: $ 0 < \delta < 1$ ----> $ 0 < \delta = \sqrt {\frac{{R^2 C}}{{4L}}} < 1$
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()