Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
Revisión de 1.1 ¿Qué es control desde la perspectiva de la automática? de 15 March, 2011 - 12:26
9 March, 2011 - 16:48 — joaquinm13
 Versión para imprimir
Versión para imprimir
La automática la define el diccionario de la Real Academia Española (RAE) como la ciencia que trata de sustituir en un proceso el operador humano por dispositivos mecánicos o electrónicos.
El término control tiene muchos significados dependiendo de la comunidad donde se aplique. Desde la perspectiva de la automática y siguiendo también la definición del RAE, hace referencia a la regulación, manual o automática, sobre un sistema. Esta regulación tiene por objeto conseguir unas condiciones determinadas de funcionamiento del sistema bajo control. Por tanto, y desde el punto de vista de esta asignatura, el término control incluye lazos de realimentación en amplificadores electrónicos, controladores de puntos de consigna en procesos químicos, ordenadores de vuelo de aviones, controladores de tráfico en Internet (routers), etc. El concepto de control va acaparando cada vez aplicaciones más sofisticadas y novedosas en los campos de vehículos y robots autónomos, sistemas biológicos, cirugía, tele-asistencia, economía, etc.
En la Figura 1.1 se muestra el esquema de un sistema controlado por computador. El cuadro superior en línea discontinua representa la dinámica del proceso (quiere decir el conjunto de ecuaciones que reflejan su comportamiento temporal) que se quiere controlar. Los actuadores (también denominados accionadores) son los elementos (usualmente de potencia: motores, electroválvulas, etc.) que actúan sobre el sistema condicionando su funcionamiento. El sistema bajo control o planta (en control, al sistema a controlar se le suele denominar planta) está representado por su modelo dinámico (modelo matemático escrito de forma adecuada para poder aplicar las técnicas de Ingeniería de Control). A la salida de la planta los sensores miden el estado de las variables que han de ser controladas (presión, temperatura, velocidad, etc.). Tanto el ruido en la actuación y la medida (el ruido es en general una mala concreción en la señal, bien porque está contaminada con ruido interno o externo, o porque no se tiene certeza de su valor y sólo se conoce hasta una precisión) como las posibles perturbaciones sobre la planta (una racha de viento en el control del rumbo de un avión por ejemplo) han de ser consideradas en el proceso de control. En este apartado de ruidos y perturbaciones habría que tener también en cuenta las posibles incertidumbres en la dinámica de la planta (errores en sus parámetros, efectos no modelados, etc.). Es deseable que el sistema de control sea robusto frente a todos estos efectos perniciosos. Esto es, esté preparado para soportarlos.
El cuadro inferior en línea discontinua de la Figura 1.1 representa el controlador. Éste sensa (mide) a la salida de la planta la/s variable/s que se desean tener bajo control. La medida, después de pasar por un filtro para acondicionarla, entra en un convertidor A/D, ya que el algoritmo que realiza el control (ley de control) está implementado en un computador. La señal de control que produce el algoritmo después de analizar la entrada que le ha llegado, se dirige a un convertidor D/A, ya que normalmente los actuadores funcionan con señales analógicas. Nótese que una señal de reloj sincroniza la operación de los convertidores y el procesado en el computador. También hay que tener en cuenta la entrada externa al computador, la cual permite cambiar parámetros y/o consignas en el algoritmo de control.
La palabra clave más importante del control es la realimentación. Nótese en la Figura 1.1 como los cuadros de línea discontinua que representan el proceso y el controlador están interconectados, de modo que la salida del primero se usa como entrada del segundo, creando de este modo un sistema en lazo cerrado.
 |
| Figura 1.1 |
El concepto central en control es el lazo de realimentación medida – computación – actuación. El primer objetivo a conseguir mediante el control es que la dinámica del sistema en lazo cerrado sea estable. Esto es, las perturbaciones acotadas han de producir como mucho errores acotados. Garantizada la estabilidad del sistema en lazo cerrado, el controlador ha de proveer otras características deseables como por ejemplo: respuesta rápida ante cambios en los puntos de consigna, rechazo o buena atenuación a las perturbaciones, etc. Las propiedades del controlador se establecen a partir de una amplia variedad de técnicas de modelado, análisis y síntesis, las cuales veremos durante el curso. Estas técnicas permiten capturar lo esencial de la dinámica del sistema así como explorar comportamientos del mismo en presencia de incertidumbres, ruido o fallos en los componentes.
La Ingeniería de Control es una disciplina de la ciencia que está muy conectada con otras que usa como herramientas: física (dinámica y modelado), matemáticas (algoritmia, análisis matemático, álgebra), computación (información y software), investigación operativa (optimización, probabilidad, teoría de juegos). No obstante lo anterior, debe quedar claro que tanto los objetivos como la aproximación al problema y su resolución son muy diferentes en la Ingeniería de Control respecto de las disciplinas anteriores.
Hoy en día, debido fundamentalmente a que las leyes de control se implementan en un computador (implementación software), el control y la ciencia de la computación están muy relacionados, sin embargo, debe quedar claro que tanto los algoritmos como el propio software son muy diferentes, debido a los requerimientos de la dinámica del sistema y a la naturaleza de implementaciones en tiempo real.
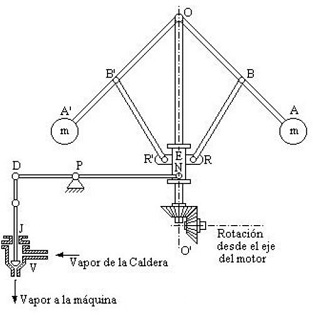 |
| Figura 1.2 |
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()