Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
1.2 Ejemplos de control mediante realimentación
14 March, 2011 - 20:19 — joaquinm13
 Versión para imprimir
Versión para imprimir
La realimentación tiene una serie de propiedades muy interesantes y útiles. Así por ejemplo permite diseñar sistemas precisos a partir de elementos imprecisos, estabilizar un sistema inestable o minimizar las perturbaciones externas sobre un sistema. A continuación se va a realizar un breve recorrido sobre ejemplos ilustrativos de a influencia de la realimentación en la consecución de hitos de control.
Primeros ejemplos tecnológicos
La proliferación de sistemas de control en la vida cotidiana ocurrió sobretodo a partir de la mitad de los años 50 del siglo pasado. No obstante, existen ejemplos aislados acontecidos mucho antes, como por ejemplo el regulador centrífugo o de bolas (inventado por el ingeniero inglés J. Watt en 1788, por lo que es también conocido como regulador de Watt), el cual (ver Figura 1.2) emplea la fuerza centrífuga originada por la velocidad de giro de las bolas del contrapeso para deslizar por un eje el mecanismo que acciona la válvula de admisión de vapor. Nótese como al estar obturado el vapor a la máquina ésta disminuirá la velocidad de rotación del eje del motor, lo cual hará que las bolas giren más despacio y tiendan a caer. Entonces, el casquillo que se desplaza por el eje será empujado hacia abajo dejando de obturar el paso de vapor a la máquina, con lo cual esta aumentará de nuevo su velocidad de giro. El regulador centrífugo es pues un controlador de la velocidad de giro de la máquina de vapor.
 |
 |
| (a) | (b) |
| Figura 1.3 | |
Otro ejemplo que, aunque más moderno que el anterior, es de finales del siglo XX, es el termostato utilizado para regular la temperatura de una vivienda, el cual fue inventado por Albert Butz en 1885 y cuya explotación comercial dio lugar a la compañía Honeywell. En la Figura 1.3 (a) puede verse un termostato de Honeywell del año 1953. En la Figura 1.3 (b) se muestra un termostato analógico de los más usuales que aún hoy pueden verse en edificios. Su funcionamiento está basado en la propiedad que presentan los metales de dilatarse al aumentar la temperatura. Se coloca un fleje con dos láminas unidas de dos metales con diferente coeficiente de dilatación (cobre e hierro por ejemplo). Cuando la temperatura aumenta, la lámina que se dilata más (en este caso la de cobre) se curva, ya que necesita más espacio, con lo cual se separan los contactos del fleje y se abre el circuito eléctrico. Esto detiene el sistema de calefacción hasta que la temperatura baje, el metal se contraiga, el fleje se estire y, como consecuencia, se cierre el circuito eléctrico que activa de nuevo la calefacción. Respecto del concepto de controlador, la lámina bimetálica actúa como tal y como sensor, ya que a partir de una temperatura de consigna fijada por el usuario mediante el mando (curvatura del fleje), el sistema la compara con la de la habitación a controlar (variable de salida); cuando hay diferencia se genera una señal de error que es realimentada para generar una señal de mando (control) que enciende o apaga la calefacción. Aunque el funcionamiento del termostato captura la esencia del control mediante realimentación, su mecanismo es demasiado simple e imperfecto (aunque útil), ya que existen retardos entre el sensor y la planta a controlar (habitación). Los termostatos de calidad actuales se anticipan apagando o encendiendo la calefacción antes que la señal de error cambie de signo, lo cual evita saltos de temperatura grandes así como ciclos de funcionamiento elevados de la máquina. Esta interacción entre la dinámica del proceso (la velocidad de calentamiento o enfriamiento de la habitación) y la operación del controlador es un elemento clave en el diseño de los sistemas de control actuales.
Con el transcurso del siglo XX se fueron desarrollando sistemas de control cada vez más sofisticados, como por ejemplo el control de crucero o controlador de velocidad para vehículos. Éste fue inventado en 1945 por el inventor ciego e ingeniero mecánico Ralph Teetor (ver Figura 1.4). Su idea nació de la frustración de ir en el vehículo con su abogado, quien frenaba y aceleraba continuamente según hablaba. El primer vehículo con el sistema de Teetor fue el Chrysler Imperial en 1958. Este sistema calculaba la velocidad sobre la carretera basándose en las rotaciones de un palier y usaba una bobina para variar la posición del acelerador según fuera necesario. Hoy en día los automóviles son quizás los sistemas que, siendo más cercanos al gran público, están dotados de más sistemas de control (control de crucero adaptativo1 , control de tracción2 , control de estabilidad3 , control de emisión de gases, etc.).
| Figura 1.4 |
Generación y transporte de energía eléctrica
El control es una misión crítica en los sistemas de producción y transporte de energía eléctrica, de modo que las centrales eléctricas están dotadas de multitud de lazos de control para garantizar su correcto funcionamiento. El control es fundamental también en el transporte de la electricidad, ya que ésta ha de ser llevada hasta el último rincón donde es necesaria y con la potencia adecuada, pero la energía eléctrica tiene muy difícil almacenaje, con lo cual hay que adecuar lo más posible la generación al consumo. La gestión de la energía en la red eléctrica es un problema de control sencillo de resolver cuando hay un solo generador y un consumidor (caso de una vivienda aislada que se genera su propia electricidad por paneles fotovoltaicos por ejemplo), pero es muy complejo es un sistema altamente distribuido, donde hay muchos generadores, muchos más consumidores y largas distancias entre ellos. Para añadir aún más complejidad al problema del control de la red eléctrica, hay que tener en cuenta que la demanda en un punto o varios a la vez puede cambiar de forma rápida e impredecible. En la Figura 1.5 se muestra a modo de ejemplo el sistema eléctrico (enero de 2009) en alta tensión que circunda la ciudad de Huelva. En color rojo se dibujan las líneas de 400 KV, en verde las de 220 KV, en azul las de 132/110 KV y, en negro, las de menos de 110 KV. Las líneas discontinuas, sean del color que sean, representan líneas programadas o en construcción de la tensión correspondiente al color. Los puntos gruesos de color negro representan subestaciones eléctricas (al lado de las centrales sirven para elevar la tensión antes de transportarla, y al lado de las poblaciones para reducir la tensión con objeto de poder usarla), y los cuadros representan las centrales con su capacidad de producción en MW. Los rellenos de negro las térmicas clásicas, los que tienen la mitad rellena de negro eólicas y los de la mitad diagonal rellena de negro de ciclo combinado. El control del sistema eléctrico exige adecuar la producción de las centrales a las necesidades de los clientes (cargas) pasando por las subestaciones.
Caídas de árboles sobre líneas, vientos, rayos, fallos en equipos, etc., pueden ocasionar perturbaciones graves en el sistema eléctrico, por ello, deben haber sofisticados sistemas de control que eliminen o minimicen sus consecuencias para el usuario final. Dependiendo de la gravedad de la perturbación los diferentes niveles del control del sistema eléctrico actuarán reduciendo la tensión, dividiendo una red en subredes, desconectando líneas y usuarios, etc. El sistema eléctrico es pues un buen ejemplo de lo complicado que puede llegar a ser un sistema de control.
 |
| Figura 1.5 |
 |
| Figura 1.6 Fotografía original del primer vuelo con motor de la historia. A los mandos Orville Wright; a la derecha, su hermano Wilbur. 17 de diciembre de 1903. El vuelo fue sobre las playas de Kitty Hawk, Carolina del Norte. El aparato, en su primer despegue, recorrió 36 metros en 12 segundos. |
Aerospacial
La consecución de un control adecuado fue probablemente la llave que permitió a los hermanos Wright hacer volar un aparato a principios del siglo XX (ver Figura 1.6). De hecho, los hermanos Wright no se hicieron famosos por demostrar simplemente el vuelo con motor, sino por demostrar el vuelo con motor controlado. Su primer aeroplano incorporaba ya superficies de control (aletas verticales y alas de pato4 ) así como alas adaptables que permitían al piloto controlar el vuelo. Realmente, un avión en vuelo es un sistema que tiende a hacerse inestable, con lo cual se necesita un sistema de control (el piloto cuando el vuelo es manual) que actúe de forma constante para que no caiga. A este primer vuelo controlado de 1903 le han seguido 100 años de éxitos continuos en la mejora de los sistemas de control de los aviones, los cuales han dado lugar a los aparatos comerciales y militares de hoy en día (ver Figura 1.7). En la Figura 1.7 (a) se muestra el Eurofighter, nacido de un consorcio anglo/alemán/italo/español. Es un avión de una maniobrabilidad extraordinaria (obsérvense sus alas de pato y de delta truncadas), para lo cual se diseñó inherentemente inestable; un cuádruple sistema de control digital da una estabilidad artificial al estar ajustando constantemente las superficies de control (Fly-by-wire5 ). En la Figura 1.7 (b) se muestra el X-45 UCAV (Unmanned Combat Air Vehicle), un avión militar no tripulado estadounidense apto para volar a match 0,85 y capaz de transportar misiles. Tanto su longitud total como envergadura de alas están en torno a los 11 metros.
 |
 |
| (a) | (b) |
| Figura 1.7. Aviones militares modernos. (a) Eurofighter Typhoon. (b) Avión no tripulado X-45 J-UCAV. | |
El sector espacial es una de las puntas de lanza del desarrollo investigador en el ámbito del control, de hecho la carrera espacial tanto rusa como norteamericana han marcado hitos tecnológicos que luego han sido de aplicación a otros campos. Uno de los grandes retos científicos que afrontó la NASA desde mediados de los años 60 fue disponer de un transbordador espacial. Esto lo consiguió el 12 de abril de 1981 con el lanzamiento del primer sistema de transbordador espacial (en inglés: Space Transport System, STS o Space Shuttle), el Columbia (ver Figura 1.8 (a). Actualmente el uso del transbordador espacial está concentrado totalmente en el ensamblaje de la Estación Espacial Internacional (en inglés: International Space Station, ISS). El tiempo de vida de transbordadores espaciales de esta clase se espera que acabe a finales de 2010. Para entonces deberán ser substituidos por el vehículo Orion norteamericano y/o la nave rusa Kliper, de mucho menor coste que los transbordadores espaciales norteamericanos.
En este apartado merece un lugar especial la sonda espacial Voyager I, la cual fue lanzada el 5 de septiembre de 1977 y gracias a que ha superado con creces sus perspectivas iniciales de vida útil (fue diseñada inicialmente para visitar Júpiter y Saturno) es hoy en día el objeto hecho por el hombre más alejado de la Tierra. De hecho está atravesando la Heliopausa6 a más de 16.000 millones de kilómetros del Sol. Cuando la Voyager I sobrepase la Heliopausa será el primer objeto de fabricación humana que abandone nuestro sistema estelar. Entonces los científicos obtendrán las primeras mediciones directas de las condiciones del espacio interestelar, las cuales podrían proveer pistas relevantes del origen y la naturaleza del universo. A esta distancia, las señales del Voyager I tardarán más de quince horas en alcanzar el centro de control en la Tierra. Voyager 1 tiene una trayectoria parabolica, y ha alcanzado velocidad de escape, lo que significa que su orbita no regresará nunca al Sistema solar interior. Esto es, vagará eternamente por el espacio enviando señales a la Tierra hasta que su sistema de energía se agote (sobre el año 2.025).
 |
 |
| (a) | (b) |
| Figura 1.8. Ingenios espaciales. (a) Lanzamiento del Columbia en 1981. (b) Sonda espacial Voyager I lanzada el 5 de septiembre de 1977. | |
Materiales y transformación
La industria química es responsable del auge considerable en el desarrollo de nuevos materiales, lo cual es clave en el desarrollo de nuestra sociedad. Además, tal como el nivel de exigencia de ésta aumenta, se hace necesario mejorar cada vez más la calidad de los productos fabricados minimizando todo tipo de riesgos, como los medioambientales por ejemplo, lo cual obliga a controles cada vez más precisos en esta industria7. Por otro lado, los procesos productivos se requieren que sean cada vez más eficientes energéticamente, lo cual ha dado lugar a los procesos de cogeneración8. Cada nuevo requerimiento añade complejidad al sistema de control de la planta industrial, creando en su proceso de diseño un nuevo desafío. En la Figura 1.9. se observa el proceso conocido como Epitaxia por haces moleculares que permite fabricar estructuras con precisión de unos pocos Angstroms (en un centímetro caben 10 millones de angstroms). Esta técnica es usada en el crecimiento de heteroestructuras de semiconductores por la gran perfección cristalina que alcanza. Los haces moleculares inciden sobre un sustrato y diversas reacciones químicas ocasionan la deposición de monocapas sucesivas. Mediante el adecuado control de las especies químicas de los haces se puede variar la composición de las capas epitaxiales. Los requerimientos técnicos son elevados pues se exige un perfecto control de la temperatura y vacío en la cámara de crecimiento.
| (a) | (b) |
| Figura 1.9. Epitaxia por haces moleculares. (a) Deposición de capas con absoluta precisión. (b) Cámara para crecimiento epitaxial. | |
Puesto que el sensor es un elemento fundamental en los sistemas de control, las nuevas tecnologías de desarrollo de sensores están proporcionando nuevas oportunidades en el desarrollo de controladores. Sensores con conexión directa al computador (controlador) de aplicación en láser backscattering9, vídeo microscopía, espectroscopía infrarroja y de Raman10, etc., están propiciando que procesos hasta ahora de laboratorio se estén incorporando al mundo industrial.
Robótica y máquinas inteligentes
El objetivo de la ingeniería cibernética, ya establecido en los años 40 e incluso antes, ha sido implementar sistemas capaces de exhibir respuestas muy flexibles o inteligentes ante cambios en la situación. De hecho, según la RAE, la cibernética estudia las analogías entre los sistemas de control y comunicación de los seres vivos y los de las máquinas; y en particular, el de las aplicaciones de los mecanismos de regulación biológica a la tecnología. Esto es, la cibernética está completamente ligada al control, y ambas disciplinas han sentado las bases de la robótica moderna.
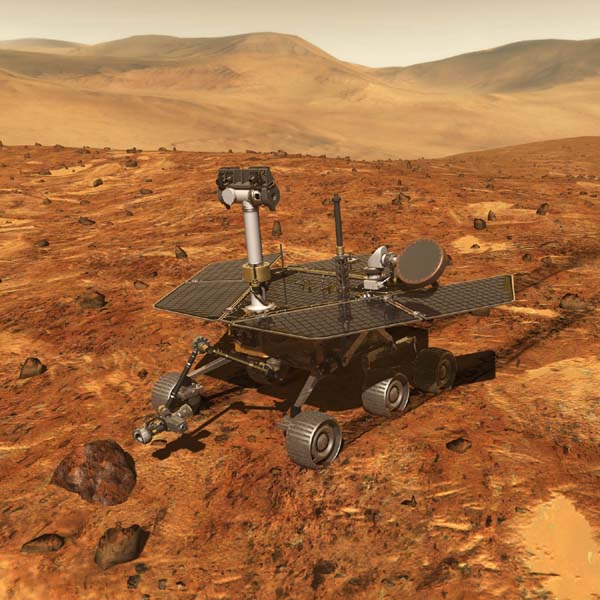
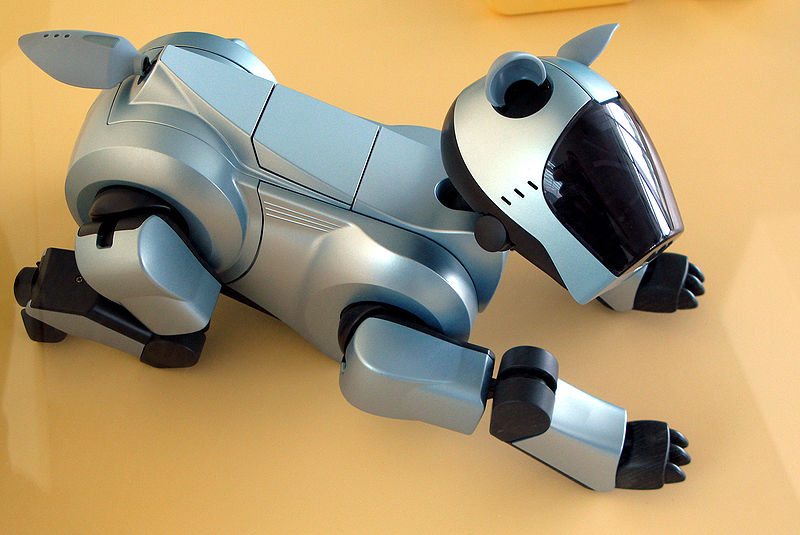
Dos logros importantes en este ámbito son los Mars Exploratory Rovers y los robots de entretenimiento como el AIBO de Sony, los cuales se muestran en la Figura 1.10. Los Mars Exploratory Rovers han sido desarrollados por el Jet Propulsion Laboratory (JPL) y han estado maniobrando en la superficie de Marte durante más de 4 años, a partir de enero de 2004, enviando medidas y fotos de su entorno de trabajo. El robot AIB de Sony, lanzado al mercado en 1.999, fue el primer robot de entretenimiento lanzado en masa al mercado. Es digno de mencionar el uso que hacía de técnicas de inteligencia artificial que le permitían reaccionar ante estímulos según su propio juicio. Este altísimo nivel de realimentación es un elemento clave en robótica, donde cuestiones como el evitar obstáculos, seguir trayectorias, aprendizaje o autonomía son muy relevantes.
A pesar de los enormes progresos acontecidos en los últimos años en el campo de la robótica, en muchos aspectos está todavía en la infancia. Los robots de hoy en día exhiben comportamientos muy simples comparados con los humanos, y sus habilidades para moverse, interpretar señales externas complejas, realizar razonamientos de alto nivel y cooperar juntos en equipo son muy limitadas. Sin duda la combinación de técnicas de inteligencia artificial (planificación, adaptación y aprendizaje) con técnicas de control contribuirá a realizar mejoras continuas en los campos citados.
 |
 |
| (a) | (b) |
| Figura 1.10. Sistemas robóticos. (a) Spirit, uno de los dos robots exploradores de Marte que aterrizó en él en enero de 2004. (b) Robot AIBO de Sony, uno de los primeros robots de entretenimiento comercializados en masa. Aunque los dos sistemas robóticos tiene cometidos muy diferentes, ambos hacen uso de realimentación entre sensores, actuadores y de computación para funcionar en entornos desconocidos. | |
Redes y sistemas informáticos
El control de redes es una gran área de investigación que abarca muchos tópicos incluyendo el control de congestión de tráfico, enrutado, copiado de datos y gestión de energía. Varias características de estos problemas de control los hacen muy interesantes. La característica dominante en todos ellos es la enorme escala de los sistemas que han de ser controlados; Internet es probablemente el mayor sistema de control realimentado que la humanidad ha construido nunca. Otra característica es la naturaleza descentralizada del problema de control: las decisiones deben ser tomadas muy rápidamente y basándose sólo en información local. La estabilidad en Internet es muy complicada debido a los retardos de tiempo variable que se producen, con lo cual la información sobre la red puede ser observada o enviada a los controladores sólo después de un retardo, con lo cual la acción de control sobre la red se produce con un retraso considerable. Incertidumbres y variaciones en la red, cambios en su topología, características del canal de transmisión, demanda de tráfico y recursos disponibles están cambiando continuamente y en forma impredecible.
El control de las redes está también íntimamente relacionado con el control de los servidores que están conectados a ellas. Los computadores son los elementos claves de los routers, servidores web y servidores de bases de datos usados para comunicaciones, comercio electrónico, publicidad y almacenamiento de la información. Mientras que los costes de hardware (la electrónica) han disminuido de forma considerable, los de operación de estos sistemas han aumentado, debido a la dificultad en su gestión y mantenimiento, como consecuencia del grado de complejidad cada vez más acusado.
En la Figura 1.11 (a) se muestra un ejemplo de un sistema multicapas para e-comercio. El sistema tiene varias capas de servidores. La capa de cabecera acepta solicitudes entrantes y las enruta hacia la de servidores http, los cuales las distribuyen hacia los servidores de aplicaciones. El tratamiento de las solicitudes entrantes puede variar en un amplio rango, y los servidores de aplicaciones pueden acceder también a otros servidores externos gestionados por otras organizaciones.
El control de un servidor individual en una capa se muestra en la Figura 1.11 (b). Una cantidad que representa la calidad del servicio o el coste de la operación –tal como tiempo de respuesta, tasa de transferencia, servicio de atención al cliente o uso de memoria– se mide en el computador. Las variables de control pueden representar mensajes entrantes aceptados, prioridades en el sistema operativo o asignación de memoria. El lazo de realimentación ha de encargarse entonces de mantener las variables que representan la calidad del servicio dentro del rango de valores fijado.
| (a) | (b) |
| Figura 1.11. Ejemplo de sistema multicapas para servicios de Internet. (a) Los usuarios solicitan información desde un conjunto de computadores (capa 1), la cual a su vez recoge información de otros computadores (capas 2 y 3). (b) Cada servidor individual tiene un conjunto de parámetros de referencia fijados por el operador (humano) del sistema. La realimentación permite además operar al sistema en presencia de incertidumbres. | |
Economía
La economía es un sistema dinámico muy grande con muchos actores: gobiernos, organizaciones, compañías y particulares. Los gobiernos controlan la economía mediante leyes y tasas, los bancos centrales fijando el tipo de interés y las compañías estableciendo precios y realizando inversiones. Las personas particulares controlan la economía mediante compras, ahorros e inversiones. Se han realizado esfuerzos enormes para modelar el sistema tanto a nivel macro11 como microeconómico12 , pero el modelado es muy complicado, ya que el sistema está muy interrelacionado y, por tanto, muy influenciado por el comportamiento dentro de él de los diferentes actores.
J. M. Keynes desarrolló en 1936 un modelo simple para comprender relaciones entre producto nacional bruto, inversión, consumo y gasto público. Una de las observaciones de Keynes fue que bajo ciertas condiciones, por ejemplo durante la gran depresión de los años 30, un incremento en el gasto público podría llevar a un gran aumento en el producto nacional bruto. Esta idea fue usada por varios gobiernos con objeto de aliviar los efectos de la gran depresión. Las ideas de Keynes serán modeladas en el capítulo siguiente.
Una de las razones de porqué es muy difícil modelar sistemas económicos es que éstos no están sometidos a leyes de conservación. Un ejemplo típico es el valor en bolsa de una empresa, el cual puede cambiar rápida y erráticamente. No obstante lo anterior, sí hay áreas concretas con leyes de conservación que sí permiten elaborar modelos precisos. Un ejemplo es el flujo de productos desde un fabricante a un minorista tal como se ilustra en la Figura 1.12. Los productos son cantidades físicas que obedecen una ley de conservación, y el sistema puede ser modelado considerando las unidades de producto en los diferentes inventarios. El control de las cadenas de producción y consumo origina importantes beneficios económicos, ya que minimiza la cantidad de producto almacenado.
Los problemas reales son más complejos de lo que indica la Figura 1.11, ya que puede haber muchos productos diferentes, muchas fábricas distribuidas geográficamente y además éstas pueden requerir materias primas o productos semielaborados.
El control de las cadenas de producción y suministro fue propuesto por J. W. Forrester en 1961 y es hoy en día de gran importancia, ya que los beneficios económicos que se obtienen minimizando inventarios son considerables. Los modelos para reducir inventarios han sufrido un auge enorme gracias al uso de las tecnologías de la información y las comunicaciones, las cuales han permitido predecir ventas, seguir la pista de productos y ajustar en consecuencia la producción justo a tiempo13. Este control de las cadenas de producción y suministro ha proporcionado éxitos notables de distribuidores a nivel mundial (piénsese por ejemplo en las grandes cadenas de hipermercado, comida rápida, tiendas de moda franquiciadas, etc.) La publicidad en Internet es una aplicación emergente de control. Advertising on the Internet is an emerging application of control. La publicidad basada en redes permite medir los efectos de las diferentes estrategias de comercialización. Las respuestas de los consumidores pueden ser modeladas, lo cual permite elaborar estrategias de realimentación.
| Figura 1.12. Dinámica de la cadena de suministro. Los productos van desde el fabricante al cliente a través de distribuidores y detallistas tal como indican las líneas sólidas. Nótese los múltiples lazos de realimentación creados por las líneas discontinuas, los cales son originados porque cada agente trata de mantener su propio nivel de inventario. |
Industria farmacéutica
La industria farmacéutica ha tenido un desarrollo espectacular a partir de la mitad del siglo XX, cuando los medicamentos han comenzado ha llegar en masa a la población en general, y el acceso a ellos se ha convertido en algo rutinario para el ciudadano de los países desarrollados. Hoy en día la industria farmacéutica tiene ante sí grandes retos para resolver problemas de salud que azotan la humanidad: cáncer, sida, cardiopatías, etc. Por ello, las inversiones en desarrollo de medicamentos son enormes y, en consonancia, lo son también la complejidad de los laboratorios y las técnicas utilizadas. Un ejemplo de esto puede ser la industria biofarmacéutica, y dentro de ella la producción industrial de anticuerpos monoclonales14 (MAB), debido a sus aplicaciones tanto diagnósticas como clínicas. Este es un campo que se encuentra actualmente en pleno desafío investigador y tecnológico.
Concretando aún más en el ejemplo, hay un gran número de complicaciones que dificultan la producción industrial de la célula hybridoma15, por ello el control industrial actual del cultivo de esta célula se realiza de forma manual. Las complicaciones que surgen para realizar un control automático radican en los requerimientos tan estrictos que exigen el crecimiento de los cultivos, la ausencia de medidas en línea de substratos esenciales en el proceso, la escasez de datos experimentales precisos, así como la dinámica extremadamente compleja del proceso. Con objeto de considerar todas las variables del proceso y la interacción entre ellas, a escala industrial se tiende a integrar el modelado, el diseño del experimento y la validación, el control y la optimización en un mismo sistema (ver Figura 1.13) que permita incrementar la productividad, regular la calidad del producto y reducir costes.
| Figura 1.13. |
Realimentación en la naturaleza
El desarrollo de metodologías rigurosas que permitan modelar el comportamiento de sistemas naturales complejos (debido a la interacción de multitud de sistemas, la mayoría de las veces muy simples, pero con intrincados patrones de flujo de información) es un aspecto de la dinámica de sistemas16. Los avances que se están produciendo en ciencia y tecnología están permitiendo concebir una comprensión más amplia en el comportamiento (dinámica) de sistemas complejos que se dan en la naturaleza. Por poner sólo algunos ejemplos:
Sistemas biológicos. Hay un interés enorme en conocer de forma fehaciente los mecanismos que se dan a nivel celular (ver en la Figura 1.14 el caso particular de las metaloproteínas17), no sólo por el hecho de utilizar este conocimiento a nivel médico para curar enfermedades, sino, como vimos en el apartado anterior, para producir medicamentos, sustancias, células, etc., a nivel industrial. Hay una gran variedad de fenómenos biológicos que proporcionan una fuente amplia de ejemplos de control, incluyendo regulación genética, mecanismos de realimentación hormonal, inmunológica y cardiovascular, control muscular y locomotor; percepción activa, visión y recepción de información sobre la localización del cuerpo, sus movimientos y el sistema sensitivo; atención y conciencia; dinámica de poblaciones y epidemias. Cada una de ellas (y muchas otras más) proporcionan oportunidades para explicar lo que funciona, cómo funciona y qué podemos hacer para afectar su funcionamiento.
| Figura 1.14. Caminos del tráfico de cobre en la célula de un mamífero. Este conocimiento es fundamental para fabricar metaloproteínas. |
Ecosistemas. Un ecosistema es un sistema natural que está formado por un conjunto de organismos vivos (biocenosis) y el medio físico en donde se relacionan (biotopo). Un ecosistema es una unidad compuesta de organismos interdependientes que comparten el mismo hábitat (ver Figura 1.15). Los ecosistemas suelen formar una serie de cadenas que muestran la interdependencia de los organismos dentro del sistema. Los ecosistemas son sistemas dinámicos complejos de múltiples escalas, que proporcionan una nueva y amplia gama de desafíos para el modelado y análisis de sistemas realimentados. La experiencia reciente en la aplicación de técnicas de control y modelado de sistemas dinámicos a las redes de bacterias, sugiere que gran parte de la complejidad de estas redes se debe a la presencia de múltiples capas de lazos de realimentación que proporcionan una funcionalidad robusta a la celda individual. Sin embargo, en otros casos, los acontecimientos a nivel celular benefician a la colonia a expensas del individuo. Análisis a nivel de sistemas se pueden aplicar a los ecosistemas con el objetivo de comprender la solidez de esos sistemas, y la medida en que las decisiones y acontecimientos que afectan a las especies individuales contribuyen a la solidez y/o fragilidad del ecosistema en su conjunto.
| (a) | (b) |
| Figura 1.15. Ejemplo de ecosistemas. (a) Sabana (Tanzania). (b) Arrecife de coral en la Gran Barrera de Coral, el mayor arrecife de coral del mundo, situado en el Mar del Coral, frente a la costa de Queensland al noreste de Australia. | |
Ciencias ambientales. Las Ciencias Ambientales son un área de la ciencia cuyo objetivo principal es buscar y conocer las relaciones que mantiene el ser humano consigo mismo y con la naturaleza. Ya se sabe que las actividades humanas han alterado el medio ambiente a escala mundial. Los investigadores en este ámbito se enfrentan a problemas de enorme complejidad; quizás el primero de ellos es comprender los sistemas de retroalimentación que operan a escala mundial..
Las ciencias ambientales Implican un área de estudio multidisciplinar que abarca distintos elementos. Incluye el estudio de problemas ambientales y la propuesta de modelos para el desarrollo sostenible. Así por ejemplo, las ciencias ambientales estudian la depuración y el tratamiento de aguas (ver Figura 1.16 (a)); esto es, el conjunto de operaciones unitarias de tipo físico, químico o biológico cuya finalidad es la eliminación o reducción de la contaminación o las características no deseables de las aguas, bien sean naturales, de abastecimiento, de proceso o residuales —llamadas, en el caso de las urbanas, aguas negras—. La finalidad de estas operaciones es obtener unas aguas con las características adecuadas al uso que se les vaya a dar, por lo que la combinación y naturaleza exacta de los procesos varía en función tanto de las propiedades de las aguas de partida como de su destino final. Otro ejemplo del campo de las ciencias ambientales es la gestión de residuos. Los residuos no aprovechables constituyen un problema para muchas sociedades, sobre todo para las grandes urbes, así como para el conjunto de la población del planeta, debido a que la sobrepoblación, las actividades humanas modernas y el consumismo, han acrecentado mucho la cantidad de basura que se genera (ver Figura 1.16 (b)); lo anterior junto con el ineficiente manejo que se hace con dichos residuos (quemas a cielo abierto, disposición en tiraderos o vertederos ineficientes), provoca problemas tales como la contaminación, que origina problemas de salud y daño al ambiente, además deprovocar conflictos sociales y políticos.
| (a) | (b) |
| Figura 1.16. Ejemplo de campos de trabajo de las ciencias ambientales. (a) Planta de depuración y tratamiento de aguas. (b) Desechos sólidos caseros clasificados. 1) envases de vidrio, 2) plástico fino, 3) plástico grueso, 4) cartón, 5) varios, 6) latas compactadas, 7) papel, 8) poliestireno, 9) pedacería de vidrio, 10) pilas, 11) metales diversos, 12) orgánicos, 13) tetrapak, 14) telas, 15) sanitarios. | |
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()