Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
2.5 Sistemas en tiempo discreto
13 June, 2011 - 19:33 — joaquinm13
 Versión para imprimir
Versión para imprimir
En los sistemas de control de hoy en día el controlador suele ser un computador (ver Figura 1.1), con lo cual sus datos de entrada (y también de salida) son palabras digitales codificadas en binario. El circuito electrónico que presenta al computador una cadena de ceros y unos correspondientes al valor analógico de entrada convertido a digital es el convertidor analógico/digital (A/D); sin embargo, previo a él hay un circuito, integrado o no en el mismo convertidor, que se denomina muestreador y retenedor (sample & hold en inglés, S&H). La función del S&H es doble: 1) obtener muestras de la señal analógica cada cierto tiempo, normalmente constante, denominado periodo de muestreo T, y 2) mantener la señal muestreada constante el tiempo suficiente para que al convertidor A/D le dé tiempo a convertirla en una palabra digital.
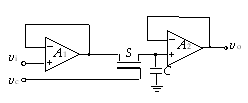 |
| Figura 2.12. Muestreador & retenedor. |
En la Figura 2.12 se muestra un esquema sencillo, casi conceptual, de S&H. Cuando una señal de control activa el interruptor S (un transistor MOSFET por ejemplo) el condensador C (un condensador de calidad para evitar fugas) se carga a la señal de entrada vi a través de la pequeña resistencia de entrada de A1 en configuración seguidor de tensión. Cuando la señal de control deja de estar activa, el interruptor se abre y la tensión almacenada en el condensador (señal muestreada) permanece estática, ya que la elevada resistencia de entrada de A2, también en configuración seguidor de tensión, evita su descarga. La tensión en el condensador es la de salida de A2, v0, y alimenta al convertidor A/D que iría a continuación. La señal de control del S&H debe ir ligada a la actuación del convertidor, con objeto de asegurar que éste tenga el tiempo suficiente para efectuar la conversión antes de capturar una nueva muestra. Nótese que el S&H funciona como una memoria analógica. En muestreo está memorizando la señal de entrada, mientras que en retención la recuerda y la mantiene en el tiempo.
En la Figura 2.13 se muestra de forma esquemática el efecto del muestreo sobre una señal continua  18. A partir de ésta, el circuito muestreador va obteniendo muestras
18. A partir de ésta, el circuito muestreador va obteniendo muestras ![\[x\left( 0 \right),x\left( 1 \right), \ldots ,x\left( n \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.4-57.png) cada incrementos de tiempo
cada incrementos de tiempo ![\[t\left( 0 \right),t\left( 1 \right), \ldots ,t\left( n \right)\]](/antonio.barragan/files/archivos_usuarios/78/form2.5-3.png) . El incremento de tiempo
. El incremento de tiempo  entre cada muestra es el tiempo o periodo de muestreo T, que normalmente es constante, con lo cual los intervalos temporales pueden ser escritos como
entre cada muestra es el tiempo o periodo de muestreo T, que normalmente es constante, con lo cual los intervalos temporales pueden ser escritos como  donde k es un índice entero de valor
donde k es un índice entero de valor ![\[k = 0,1,2, \ldots \]](/antonio.barragan/files/archivos_usuarios/78/form2.5-6.png)
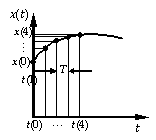 |
| Figura 2.13. Muestreo de una señal. |
El control por computador implica que las leyes de control se implementen mediante software19, con lo cual las acciones a realizar sobre un sistema bajo control se desarrollan en el computador mediante un algoritmo20, el cual trabaja en tiempo discreto. Esto implica que el trabajo con el computador involucra el manejo de señales cuyo valor es aproximado, ya que no se tienen completas. Sin embargo, esto no quiere decir que a efectos prácticos se obtengan menos prestaciones, ya que el error, la mayoría de las veces, se puede acotar, con lo cual bastará con utilizar un periodo de muestreo más pequeño para obtener mayor precisión21.
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()