Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
Revisión de 2.5.1 Motivación de 14 June, 2011 - 15:36
13 June, 2011 - 20:41 — joaquinm13
 Versión para imprimir
Versión para imprimir
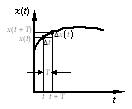 |
| Figura 2.14. Definición de derivada. |
Ejemplo 2.10. Solución aproximada de una ecuación diferencial ordinaria. Considérese el cálculo numérico de una ecuación diferencial ordinaria de primer orden y sea ésta, como ejemplo, la siguiente:
| (2.91) |
La rama de las matemáticas que soluciona este tipo de problemas es el análisis o cálculo numérico. Esta disciplina crea algoritmos que permiten resolver problemas, en los que estén involucradas cantidades numéricas, con una precisión determinada.
El análisis numérico es de aplicación cuando: 1) Los problemas no tienen solución analítica o 2) el coste de cálculo de la solución analítica es mayor que la numérica. Para la resolución de ecuaciones diferenciales ordinarias los métodos más utilizados son el método de Euler y los métodos de Runge-Kutta22.
Volviendo con el ejemplo, nótese en la Figura 2.14 que para T pequeño,  puede aproximarse por la relación incremental (definición de derivada) siguiente:
puede aproximarse por la relación incremental (definición de derivada) siguiente:
| (2.92) |
Resolviendo la ecuación anterior para  se tiene que
se tiene que
 |
(2.93) |
Evaluando esta ecuación para un tiempo discreto cualquiera t = kT se obtiene la ecuación en diferencias siguiente:
![$x\left[ {\left( {k + 1} \right)T} \right] = \left( {1 + Ta} \right)x\left( {kT} \right) + T\,b\,u\left( {kT} \right)$](/antonio.barragan/files/archivos_usuarios/78/form2.5.1-5%282.94%29.png) |
(2.94) |
La cual, para un T dado, puede ser escrita como
 |
(2.95) |
La expresión anterior indica que el valor de la trayectoria (solución) en el instante de tiempo  se calcula a partir del valor de x y de la excitación (entrada) u en el instante k.
se calcula a partir del valor de x y de la excitación (entrada) u en el instante k.
La ecuación diferencial original (2.91) ha sido pues transformada por este método numérico sencillo (denominado de Euler23) en la ecuación en diferencias (2.94). Ésta puede ser programada ahora mediante un algoritmo numérico simple en un computador. Así por ejemplo, si  ,
,  y
y  para k par;
para k par; para k impar, y
para k impar, y  , se tiene que las primeras 5 muestras de
, se tiene que las primeras 5 muestras de  valen
valen
![\[\begin{array}{*{20}{c}} {x\left( 0 \right) = 2x\left( { - 1} \right) + u\left( { - 1} \right) = 0} \hfill \\ {x\left( 1 \right) = 2x\left( 0 \right) + u\left( 0 \right) = 0 + 1 = 1} \hfill \\ {x\left( 2 \right) = 2x\left( 1 \right) + u\left( 1 \right) = 2 + 0 = 2} \hfill \\ {x\left( 3 \right) = 2x\left( 2 \right) + u\left( 2 \right) = 4 + 1 = 5} \hfill \\ {x\left( 4 \right) = 2x\left( 3 \right) + u\left( 3 \right) = 10 + 0 = 10} \hfill \\ \end{array}\]](/antonio.barragan/files/archivos_usuarios/78/form2.5.1-13.png) |
(2.96) |
Si se observa la ecuación (2.91), su expresión es la de un modelo de estado de orden 1 y, por ende, la ecuación (2.95) es la discretización de un modelo de estado de orden 1. Con objeto de extender lo anterior para el caso de sistemas de orden mayor que 1, se parte de la ecuación de estado lineal general que reproducimos a continuación por comodidad:
 |
(2.97) |
Aplicando a esta ecuación el proceso descrito para llegar de (2.91) a (2.95), se tiene que la ecuación matricial en diferencias del modelo de estado lineal continuo estará dada por
 |
(2.98) |
Esta ecuación permite ver enseguida que la ecuación de estado discreta lineal tiene un aspecto muy similar a la de tiempo continuo. Ahora también dos matrices multiplican a los vectores de estado y de entrada igual que en el caso continuo. Respecto de la dependencia temporal de las variables, sus argumentos han sido sustituidos por el tiempo discreto k y por k + 1 para el vector de estado derivado. Esto se formalizará en la sección siguiente.
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()