Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
Revisión de KNX/EIB de 18 June, 2012 - 12:21
11 June, 2012 - 16:57 — Juan Antonio
 Versión para imprimir
Versión para imprimir

Juan Antonio Gil Camacho
José Rafael Sánchez Berrocal
Juan Antonio Sánchez Oliva
Características principales
Características del sistema EIB.
Cuestiones básicas.
Características de la transmisión.
Tecnología
Descripción general
Tecnología de los componentes
Alimentación del sistema EIB
Topología
Descripción general
Modo de configuración
Direccionamiento
Dirección física
Dirección lógica o de grupo
Comunicación
Protocolo KNX/EIB
Elección de EIB frente a otras alternativas
Ventajas
Desventajas del sistema EIB.
Ejemplos de aplicación del KNX/EIB
Referencias
2. Características principales
2.1 Características del sistema EIB.
2.1.1 Cuestiones básicas
El EIB es un sistema descentralizado en el que cada dispositivo puede ejercer una serie de funciones de forma autónoma o relacionada con otros dispositivos. Al ser un sistema descentralizado si un elemento del sistema falla, éste puede seguir funcionando aunque sea parcialmente. Esto es así porque todos los dispositivos que se conectan al bus de comunicación de datos tienen su propio microprocesador y electrónica de acceso al medio.
En este sistema existen varios medios físicos para la interconexión de los dispositivos:
• Cable de pares.
• Red eléctrica de baja tensión.
• Radiofrecuencia.
• Infrarrojo
La elección de un medio de transmisión u otro dependerá del tipo de edificio y de las instalaciones con las que éste cuente. Así, si el edificio es de nueva construcción el par trenzado es quizás el medio más óptimo, mientras que si el edificio está ya construido es posible que interese más el uso de la línea de potencia o radiofrecuencias.
En una red EIB podremos encontrar cinco tipos de componentes: módulos de alimentación de la red, acopladores de línea para interconectar diferentes segmentos de red, el bus, elementos actuadores y elementos sensores.
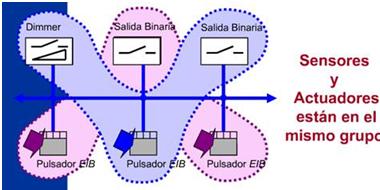
El bus es el medio físico al que se conectan los componentes del sistema. Los sensores son los elementos que se encargan de detectar los cambios en cualquier actividad de éste (operación de un interruptor, cambio en parámetros físicos, movimientos) mientras que los actuadores son los encargados de recibir las órdenes de los sensores y ejecutar la serie de acciones pertinentes. Los sensores funcionarán, por tanto, como entradas al sistema mientras que los actuadores serán las salidas para la activación y regulación de cargas.
En el sistema EIB los datos se envían como una señal alterna superpuesta sobre una tensión de alimentación continua, por lo que a la hora de separar datos de alimentación los dispositivos han de tener un sistema para desacoplar ambas señales.
2.1.2 Características de la transmisión
Los datos son transmitidos en modo simétrico sobre el par de conductores que hacen de medio de transmisión. Además, se emplea transmisión diferencial que, junto con la simetría de los conductores del medio físico, garantiza que el ruido afectará de igual forma a los dos conductores. De este modo, la diferencia de tensiones permanece invariante. Esta es la técnica empleada en la mayoría de las redes de comunicación de datos.
En este sistema, para conseguir la simetría, el dispositivo genera la semionda negativa, siendo la fuente de alimentación de la línea a la que está conectado dicho dispositivo, la que genera la semionda positiva (Recordemos transmisión simétrica y diferencial). Debido a esto, existen limitaciones en cuanto a la distancia máxima entre un componente y la fuente de alimentación del bus, que interviene de modo pasivo en la codificación de los datos.
El sistema se hace más inmune al ruido al utilizar un acoplamiento aislado en cada dispositivo, ya que éste hace disminuir la baja resistencia del enlace.
La transmisión de la información es en modo asíncrono y a una tasa de 9600 bps.
3. Tecnología
3.1 Descripción general
Cada línea precisa de su propia fuente de alimentación para los componentes. Con esto se garantiza que, en caso de fallo de una línea, el resto del sistema permanece en funcionamiento.
La fuente de alimentación proporciona a cada componente de la línea una corriente continua de 24 V y puede soportar hasta 640 mA. Tiene, además, limitaciones tanto de tensión como de intensidad y es resistente a los cortocircuitos. Las interrupciones breves de la red de alimentación se salvan con un tiempo de amortiguación de 100 ms.
La carga del bus depende del tipo de componente conectado. Los componentes están preparados para funcionar hasta con una tensión mínima de 21 V DC y absorben, por término medio, unos 150 mW del bus o hasta 2 W con consumo adicional de corriente en el aparato final (por ejemplo, en el caso de diodos LED).
Si se montan más de 30 componentes en un tramo reducido del circuito bus como, por ejemplo, en un cuadro eléctrico, se debe situar la fuente de alimentación lo más cerca posible de la concentración de elementos.
En una línea se pueden utilizar como máximo dos fuentes de alimentación. Entre ambas debe mantenerse una distancia mínima de 200 m. Si fuera necesario un consumo superior de energía, se pueden conectar al sistema dos fuentes de alimentación en paralelo a través de una bobina común, de esta manera se aumenta la carga de corriente admitida en la línea a 500 mA.
La longitud del conductor de una línea no debe sobrepasar los 1.000 m, incluidas todas las ramificaciones. La distancia entre una fuente de alimentación y un componente no debe ser mayor de 350 m. Para evitar las colisiones entre telegramas, la distancia existente entre dos componentes cualesquiera ha de limitarse a 700 m máximo.
El bus conductor puede tenderse en paralelo al conductor de red.
En caso de ramificaciones no se necesita una resistencia de cierre al final de la línea. Los componentes se conectan al bus mediante contactos a presión o por medio de bornas de bus. La conexión por contacto a presión se logra mediante la fijación de los componentes para incorporar en armario sobre el perfil sombrero DIN EN 50 022, de 35 mm x 7,5 mm, que lleva adherido un perfil de datos. La transmisión desde el perfil de datos al conductor bus se realiza a través de un conector. La conexión del cable bus a los componentes de montaje empotrado o saliente, en pared, en techo o para incorporar en otros aparatos, se realiza mediante una borna de bus enchufable.
3.2 Tecnología de los componentes
Cada componente está constituido básicamente por un acoplador universal al bus (BA) y un aparato final de bus (BE), específico para una determinada tarea, que intercambia información con al acoplador universal a través de la interfaz usuario.
El acoplador BA recibe los telegramas del bus, los descodifica y controla el aparato final de bus BE. En sentido contrario, el BE suministra la información al acoplador BA, el cual la codifica y la envía al bus en forma de telegrama.
El acoplador de bus BA conserva, durante las fases de proyecto y puesta en servicio, los datos de parametrización para la función a realizar. Para ello, incorpora un microprocesador con los siguientes módulos de memoria:
Una memoria no volátil (ROM), en la que se almacena el programa específico del sistema, que no puede ser modificado por el usuario.
Una memoria volátil (RAM), en la que se almacenan los datos empleados durante el funcionamiento del sistema.
Una memoria no volátil y reprogramable eléctricamente (EEPROM), que almacena los datos de parametrización para el funcionamiento del acoplador al bus.
La disposición de los conectores (pines) de la interfaz varía en función de los elementos BE conectados. Así pues, un BE sólo puede comunicarse sin fallos con su correspondiente acoplador de bus BA (a través de la interfaz correspondiente), cuando en la EEPROM del BA se han cargado los programas de aplicación apropiados.
4. Alimentación del sistema EIB
Cada línea tiene su propia alimentación de corriente para los componentes.
Esto garantiza que, incluso si hay un fallo en una línea, el resto del sistema puede continuar funcionando.
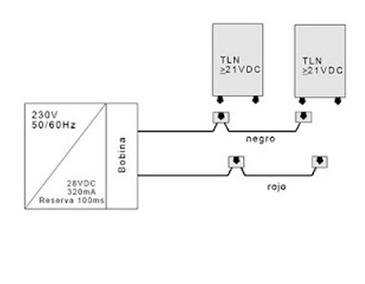
Las fuentes alimentación tienen regulaciones de tensión y corriente, por lo que son resistentes a los cortocircuitos. Además, son capaces de salvar micro-cortes de la red ya que tienen un tiempo de reserva de 100ms.
El cable conductor PYCYM 2x2x0,8 tiene una sección por hilo de 0,5mm² y, por ello, una resistencia del bucle de 72Ω/Km.
Los componentes (TLN) toman del bus una potencia constante y están preparados para funcionar con un mínimo de 21V.

La absorción de potencia supone, aproximadamente, 150mW/componente, aunque algunos aparatos pueden llegar a consumir 200mW.
Por este motivo pueden instalarse dos fuentes de alimentación en paralelo si fuera necesario, siempre que se emplee una bobina común. De esta forma aumenta la corriente admisible en el bus a 500mA.
También es necesario añadir otra fuente en el caso de que se instalen más de 30 componentes sobre un cable de pequeña longitud (por ejemplo, en un armario de distribución). En cualquier caso, la distancia mínima entre dos fuentes debe ser de 200m y el número máximo de fuentes por línea debe ser 2 como máximo.
La longitud del cable para cada línea no debe exceder los 1000m, incluyendo todas las ramas y bucles y no se necesita resistencia de cierre.
Para excluir totalmente la posibilidad de colisiones entre telegramas hay que respetar una distancia máxima entre componentes de 700m.

5. Topología
En el sistema EIB la transmisión de las señales se hace a través de un cable o bus al que están conectados todos los dispositivos. El Bus de Instalación Europea (EIB) permite que todos los componentes de las instalaciones domóticas estén intercomunicados entre sí, de esta forma, es posible que cualquier componente de órdenes a cualquier otro, independientemente de la distancia entre ellos y su ubicación.
Para interconectar los dispositivos del bus en cada línea se permite cualquier tipo de topología: árbol, estrella, bus o anillo. Solamente no se permitirá cerrar anillos entre líneas situadas topológicamente en diferentes áreas.
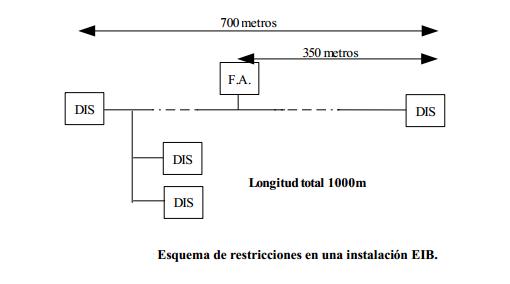
El EIB define una red jerarquizada en la cual la unidad mínima será la línea. Una línea puede tener conectada un total de 64 dispositivos como máximo. Esto depende de la carga máxima soportada por la fuente de alimentación situada en cada una de ellas. En una línea se han de cumplir las siguientes restricciones:
• Se disponga como mínimo de una fuente de alimentación.
• No supere los 1000 metros la longitud total de la instalación.
• Entre un dispositivo y la fuente de alimentación no ha de haber más de 350 metros.
• Entre los distintos elementos de la línea no pueden superarse los 750 metros.
• Haya una separación mínima entre las fuentes de alimentación de 200 metros.
En la siguiente figura se muestran algunas de estas distancias:
En el sistema EIB la línea es la célula fundamental. Uniendo varias líneas obtendremos un área. El área está formada por una línea principal o maestra desde la cual pueden salir hasta 15 líneas secundarias o esclavas. Si dijimos que podíamos tener un total de 64 dispositivos por línea, esto supone un total de 960 dispositivos por área. Las líneas secundarias o esclavas se conectan a la maestra a través de un elemento llamado acoplador de línea. Conviene señalar que a cada línea hay que dotarla de su propia fuente de alimentación y se han de cumplir las restricciones de diseño señaladas. En la siguiente figura, se muestra la configuración de un área.

De la misma forma, podríamos unir hasta 15 áreas mediante una línea principal. Ésta se denominará “backbone”, de esta forma, el número máximo de dispositivos que podremos gestionar será 14400. Cada área se conecta al “backbone” a través de acopladores de área. En la siguiente figura, podemos ver un esquema de esto.

Según se ha mencionado, el dispositivo acoplador puede utilizarse de varias formas:
• Acoplador de línea: En esta situación se encargará de unir la línea de zonas (a la que se enganchan los dispositivos 1-64) con la línea principal de cada área.
• Acoplador de Áreas: En esta situación se encargará de unir las líneas principales de cada área con la línea de áreas.
Tanto la línea de áreas como las líneas principales de cada área pueden tener conectados dispositivos. Los acopladores de línea y área sólo dejan pasar telegramas relacionados con los componentes que les pertenezcan. Esto es así, porque en la parametrización del sistema cada acoplador recibe una tabla de filtros. De esta manera, todos los telegramas que se reciban son ignorados si la dirección a la que están dirigidos se encuentra entre las de la tabla. Así, se consigue que cada línea trabaje independientemente y, además, al dejar pasar solamente los telegramas dirigidos a los dispositivos que en ella se encuentran, se evita la sobrecarga del bus.
6. Modo de configuración
El estándar KNX incorpora tres modos de configuración distintos:
- 1. El S-Mode (modo sistema, System)
- Está enfocado a funciones de control sofisticadas en edificios (personal cualificado).
- Todos los componentes S-Mode serán programados por ETS3-Profesional de acuerdo con una base de datos de productos suministrada por los fabricantes.
- Esta configuración ofrece el mayor grado de flexibilidad y funcionalidad.
- 2. El E-Mode (modo fácil, Easy)
- Aprendizaje sencillo (personal con formación básica).
- Los componentes de E-Mode están ya preprogramados con una serie de parámetros. Cada componente puede ser reconfigurado sólo en parte.
- La configuración se realiza con ETS3-Starter.
- 3. El A-Mode (modo automático, Automatic)
- Aplicaciones de usuario final.
- Disponen de mecanismos de configuración automática que adaptan susu enlaces de comunicación al resto de componentes A-Mode.
Cada componente tiene un número de parámetros fijos y una librería de instrucciones de cómo comunicar con otros componentes.
7. Direccionamiento
7.1. Dirección física
A cada aparato que se conecta al bus se le asigna una dirección física, por lo que cada aparato es único dentro del bus por lo que puede ser fácilmente seleccionado y programado.
La dirección física de acuerdo con la topología del sistema tiene el siguiente formato de los cuales se utilizan Los 16 bits de la dirección, se dividen de la siguiente forma:
Zona (F). Línea (L). Aparato (D) (D)
| Zona | Línea | Aparato |
| ZZZZ | LLLL | CCCCCCCC |
| 4bits | 4bits | 8 bits |
Donde:
- ZZZZ: Número de la zona funcional (1-15)
- LLLL: Número de la línea dentro de la zona definida (1-12)
- CCCCCCCC: Número de componente (1-64)
Ejemplo de dirección física:

7.2 Dirección lógica o de grupo
La dirección lógica o de grupo es con la que trabajará realmente la instalación mientras está en funcionamiento y no tiene por qué ser única, es decir, durante la realización del proyecto se pueden determinar hasta catorce direcciones de grupo, en función de las diferentes partes de la instalación, de forma que varios dispositivos pueden compartir una misma dirección lógica.
Esto sirve para definir grupos de dispositivos desde el punto de vista de la función técnica que van a desempeñar (del tipo "luces del piso de arriba", "interruptores", "sensores de alarma", etc.).
Cada grupo principal contiene, según el criterio del usuario, hasta 2.048 subgrupos. Como se ha dicho antes, las direcciones de grupo de los componentes se ordenan independientemente de las direcciones físicas. De este modo, cada componente puede comunicarse con cualquier otro.
Así pues, para el funcionamiento práctico del sistema se requiere una dirección, llamada dirección de grupo, destinada al tráfico de telegramas. En cada telegrama se incluye la dirección de grupo del receptor, de manera que los componentes del bus leen esta dirección, lo que determina si deben aceptar o no la información. Los componentes del bus pueden responder a más de una dirección de grupo.
La recepción del telegrama será efectiva sólo si la dirección de grupo coincide con alguna de las que tiene el componente y, además, la transmisión es correcta.
Esquema de direccionamiento de grupo:
8. Comunicación
La comunicación entre sensores y actuadores independientemente del medio físico se realiza mediante un telegrama.
| T1 | Telegrama | T2 | Acuse recibo |
En el esquema anterior después de un tiempo T1 en que se encuentre desocupado el bus. El componente EIB está en condiciones de enviar el telegrama.
Al finalizar el envío del mismo se espera un tiempo T2 para asegurarse el mismo. Cada uno de los componentes a los que van dirigido el telegrama devuelve un acuse de recibo de forma simultánea.
- Cada byte de datos (8 bits), se agrupa formando caracteres o palabras, que además de estos, se componen de 8 bits:
- ST: es un bit de inicio, que indica el comienzo de una nueva palabra.
- P: es el llamado bit de paridad, trabaja con paridad par y completa la suma de los bits de datos, para trabajar con dicha paridad.
- SP: es un bit de parada, e indica que la palabra o carácter ha terminado.
- Pausa: después de bit de parada, se espera un tiempo de pausa equivalente a dos bits para continuar con la próxima palabra.
| ST | D0 | D1 | D2 | D3 | D4 | D5 | D6 | D7 | P | SP | Pausa |
| Palabra o carácter 1,35 |
| Control |
Dirección Emisor |
Dirección destinatario | Contador | Longitud | Datos | CRC |
| 8 bits | 16 bits | 16+1 bits | 3 | 4 | Hasta 16*8bits | 8 bits |
Telegrama de 8 a 23 caracteres 20-40 ms
El campo de control sirve para determinar la prioridad del mensaje, así como marca inicial del telegrama. Tanto la dirección del emisor como la del destinatario siguen el formato explicado en el apartado siguiente, añadiendo un bit más en la dirección del destinatario que indica si se trata de una dirección física o de una dirección de grupo El contador se utiliza para funciones de enrutamiento, contando el número de saltos que ha dado el paquete. El último byte CRC se utiliza para comprobar que los anteriores han sido transmitidos correctamente.
Esquema de los componentes del bus:

Para el caso de que el módulo BCU y el módulo AM se adquieran por separado se ha normalizado la conexión mediante la Interfaz Externa y Física (PEI Physical External Inteface).
El módulo de aplicación y el programa fijan la función del componente bus.
Cada dispositivo, dos partes:
- Unidad de acoplamiento al bus(BCU - Bus Coupling Unit)
- Módulo de la aplicación(AM - Application Module)
Para el caso de que el módulo BCU y el módulo AM se adquieran por separado se ha normalizado la conexión mediante la Interfaz Externa y Física (PEI Physical External Inteface).
El módulo de aplicación y el programa fijan la función del componente bus.
Unidad de acoplamiento al bus (BCU)
La información a procesar se transfiere desde el bus hasta la unidad de acoplamiento al bus (BCU). Ésta garantiza además la alimentación de su electrónica interna y almacena datos importantes como el programa de aplicación y los parámetros.

Objetos de comunicación en BCU:
- La parte más importante del BCU son los objetos de comunicación (canales). Estos contienen información relevante sobre el estado del dispositivo, por ejemplo, si una lámpara esta encendida o apagada, la hora y fecha de un reloj, o si se ha pulsado un determinado interruptor.
- Cada dispositivo puede tener uno o más objetos de comunicación, según el estándar EIS. Cada objeto de comunicación tiene una dirección de grupo asociada que es única si se trata de un objeto de comunicación emisor o que pueden ser varias si es un objeto de comunicación receptor.
- Un objeto de comunicación emisor y otro receptor se ligan entre sí asociándoles una misma dirección de grupo, siendo del mismo tipo.
- Cuando cambia el valor del emisor, la BCU se encarga de transmitir el nuevo valor al grupo asociado. Todos los objetos de comunicación receptores que tengan la misma de dirección de grupo se enterarán del cambio y actuaran en consecuencia.
9. Configuración de objetos de comunicación

Medio de comunicación KNX/EIB
KNX es un sistema descentralizado, es decir, no existe ningún controlador central. Todos los componentes del sistema tienen su propia inteligencia, por lo que trabajan como unidades de control independientes y deben de ser programadas. Este es uno de los motivos por lo que este sistema es más costoso que otros como el X-10.
Se pueden instalar sistema KNX que utilizan varios medios de comunicación. De este modo los usuarios pueden decidir cuál es el que mejor se adapta a las necesidades de la instalación automatizada a la que están destinados. Igualmente, los instaladores pueden elegir aquel medio físico que se adapte mejor a las condiciones del edificio y a las condiciones técnicas y económicas de la instalación. Los medios de comunicación de KNX son los siguientes:
- Cable de pares trenzados. El canal de comunicaciones es un par de cables trenzados. Tiene dos variantes:
- Par trenzado tipo 0 (TP-0): este soporte es herencia del sistema BatiBUS. Alcanza una velocidad de transmisión de datos máxima de 4800 bits por segundo (bps). Hay que tener en cuenta que en caso de tener instalado componente KNX TP-0 y componentes BatiBUS TP-0 compartiendo el mismo sistema, esto no pueden entre si ya que el protocolo que utilizan es diferente.
- Par trenzado tipo 1 (TP-1): es el soporte que se han estandarizado en la mayoría de las instalaciones e incluso en los centros de enseñanza. Proviene del EIB y los datos pueden viajar por el a una velocidad máxima de 9600 bps. Como ya hemos comentado anteriormente, KNX está basado en la tecnología EIB. Gracias a esto los componentes KNX TP-1 y EIB son compatibles entre sí, por lo que, en el caso de disponer de dispositivos de ambas procedencias compartiendo el mismo sistema, las comunicaciones entre ellos se realizan perfectamente.
- Cable eléctrico de la instalación. Los conductores que sirven para llevar la tensión y la corriente eléctrica a las cargas se utilizan como soporte de las comunicaciones. Esto es posible ya que se utiliza la tecnología de corrientes portadora para la transmisión de información entre los dispositivos del sistema de automatización. Existen dos posibilidades para implementar las corrientes portadoras:
-
Corriente portadora a 110 kHz: es herencia del EIB. Con este medio de comunicación se puede alcanzar velocidades máximas de transmisión de datos 1200 bps. Como ya hemos mencionado anteriormente EIB y KNX son compatibles. Por este motivo los componentes KNX PL-110 y EIB PL-110, pueden comunicarse entre sí sin problemas. Corrientes portadoras a 132 kHz: fue desarrollado en el sistema EHS y es una evolución del mismo. Se alcanzan velocidades de transmisión de datos de hasta 2400 bps. Aunque en principio existe una incompatibilidad en los sistemas EHS y KNX en cuanto a las comunicaciones, si en un sistema conviven componentes KNX PL-132 y EHS 1.3ª, pueden asegurarse las comunicaciones entre ellos siempre que se instale un convertidor de protocolo.
- Corrientes portadoras a 132 kHz: fue desarrollado en el sistema EHS y es una evolución del mismo. Se alcanzan velocidades de transmisión de datos de hasta 2400 bps. Aunque en principio existe una incompatibilidad en los sistemas EHS y KNX en cuanto a las comunicaciones, si en un sistema conviven componentes KNX PL-132 y EHS 1.3ª, pueden asegurarse las comunicaciones entre ellos siempre que se instale un convertidor de protocolo.

- Radio frecuencia. Medio de transmisión más actual que los demás, desarrollado por KNX. Las comunicaciones entre dispositivos se realizan tomando como medio físico en aire, gracias a la utilización de ondas hertzianas. De esta forma se alcanzan velocidades de transmisión de hasta 16384 kbps con una cobertura de hasta 300 metros en campo abierto emitiendo una potencia de transmisión de 25 mW.
10. Protocolo KNX/EIB
El protocolo KNX se basa en su mayoría en el protocolo EIB. EIB fue promovido por la EIBA con el objetivo de crear un estándar europeo, con el suficiente número de fabricantes, instaladores y usuarios, que permita la comunicación de todos los dispositivos de una instalación eléctrica. La EIBA es una asociación de más de 115 empresas europeas lideres en el mercado eléctrico (Todos sus miembros cubren más del 80% de la demanda de equipamiento eléctrico en Europa) que se unieron en 1990 con el fin de impulsar la creación de un estándar domótico europeo.
EIB, es un protocolo de red abierto, que se fortalece del aporte de todas y cada una de la infinidad de empresas que lo suscriben. Son tantas que la cantidad y la diversidad de dispositivos existentes supera la de cualquier otro sistema en la actualidad. Según datos de la EIBA, a principios del año 2003, había unos 10 millones de dispositivos EIB instalados por todo el mundo, unas 70.000 instalaciones, una gama de 4.500 productos diferentes, y más de 70.000 instaladores cualificados.
El funcionamiento del EIB es el mismo que el del KNX: En un principio solo se contemplo como medio físico un único cable de dos hilos conductores o bus de cable, a través del cual se comunican entre sí los participantes del bus. Este sistema sobre par trenzado funciona a 9.6 Kbps. La alimentación de 24 Vdc se suministra a los componentes a través de los propios hilos conductores de este.
Cada dispositivo EIB Tiene dos direcciones de 16 bits, la física y la lógica. Ambas se asignan al preparar la instalación pero tienen funciones diferentes, y son mutuamente excluyentes, (es decir se usa solo una de las dos). En realidad la dirección física solo se utiliza mientras se da de alta la instalación o se configuran los dispositivos de la instalación. Su misión es identificar cada uno de los dispositivos, diferenciándolos de los demás. Está definida en función de la posición del dispositivo de en la matriz de conexión. De esta forma cada dispositivo que conectemos tendrá su dirección física compuesta de: zona (4 bits) + línea (4 bits) + dispositivo (8 bits); en total 64.000 posibilidades de direccionamiento. Por otro lado, la dirección lógica o de grupo de 16 bits, es con la que el dispositivo trabajará realmente en la instalación mientras está operando de forma normal, y no tiene por qué ser única (varios dispositivos pueden compartir una misma dirección lógica). Por lo tanto sirve para definir grupos de dispositivos desde un punto de vista funcional (del tipo de luces, interruptores, sensores de alarma, etc.).
La topología o forma en la que se extiende el bus del cable al que se conectan los distintos dispositivos, pueden tener un aspecto que podríamos denotar por matricial. En primer lugar se forman líneas, cada una de las cuales puede tener conectados hasta 255 dispositivos, utilizando cada uno de ellos un dispositivo denominado acoplador al bus. Cada línea puede tener una longitud máxima de 1.000 metros en total (sumando todas las ramas y respetando ciertas limitaciones en cuanto a la distribución de los dispositivos respecto a la fuente). Después, en un extremo de la línea se puede conectar un aparato denominado acoplador de línea, que hace las veces de puente y que, en este caso, permite colgar ésta y otras líneas hasta un máximo de 16, de una principal para formar una matriz denominada zona. Siguiendo la misma estructura que antes, las zonas también se pueden conectar entre si, hasta un máximo de 16. Para ello, cada zona se conecta a un cable general, mediante un dispositivo denominado acoplador a la red troncal. Finalmente el sistema completo podrá conectarse a otros sistemas iguales o diferentes, mediante la pasarela correspondiente.
La característica fundamental del EIB es su organización descentralizada, es decir todos los componentes del sistema pueden comunicarse entre sí sin necesidad de una unidad centra de control.
También se pretendió que el EIB funcionase sobre otros medios físicos, aunque en la práctica sólo el par trenzado ha conseguido una implantación masiva:
- EIB.PL Corrientes portadoras sobre 230 Vac y 50 Hz a 1200/2400 bps.
- EIB.net Ethernet a 10 Mbps.
- EIB.RF Radiofrecuencia.
- EIB.IR Infrarrojo.
- Y ahora como última novedad EIB. bluetooth
Por último, es importante destacar que EIB contempla una serie de herramientas software basadas en el PC. Por ejemplo el ETS3 es un programa sobre plataforma windows que facilita el desarrollo de proyectos de ingeniería EIB, como el diseño y la configuración, con independencia del fabricante de los productos.
11. Elección de EIB frente a otras alternativas
Sin entrar en una comparación pormenorizada entre las diferentes tecnologías que se comercializan en la actualidad, se destacan a continuación algunas de las características del sistema EIB que la hacen preferible a otras alternativas:
Compatibilidad
Es un sistema abierto, con un protocolo libre, para el que producen componentes los principales fabricantes mundiales de material eléctrico.
Potencia
Permite la conexión de más de 12.000 componentes en una misma instalación, para automatizar una gran cantidad de funciones. Hace posible, además, el desarrollo de nuevas funciones de automatización.
Simplicidad de instalación
En las instalaciones eléctricas convencionales cada función necesita su cableado, en cambio, con EIB todas las funciones operativas y todos los procedimientos pueden ser controlados, monitorizados y alimentados a través de la instalación de una única línea de comunicación (bus).
Versatilidad
Puede conectarse a otras redes de datos y servicios (RDSI, Ethernet, Red Telefónica Conmutada, ProfiBUS, etc.), así como a centros de control exteriores (como centrales de alarma).
12. Ventajas
Ahorro de energía
Se ahorra energía desconectando la iluminación y la calefacción / aire acondicionado cuando no son necesarios. En zonas de paso y utilizando sensores de movimiento, encender la iluminación al acercarse una persona, apagándose automáticamente transcurrido el tiempo programado. En centros de trabajo y mediante sensores de luminosidad, desconectar la iluminación cuando no es necesaria, porque entre suficiente iluminación por las ventanas. Una variante más avanzada es, con el mismo sensor de luminosidad, regular la iluminación de forma que el nivel luminoso en el plano de trabajo sea siempre constante. La calefacción o aire acondicionado pueden desconectarse automáticamente al abrir las ventanas. Con un solo pulsador o interruptor horario puede modificarse la temperatura de ajuste de todos los termostatos de la instalación, reduciéndola en invierno y elevándola en verano cuando no se utilizan los locales. Para esta operación no es necesario manipular en los termostatos.
Flexibilidad
Es un sistema fácilmente ampliable, modificable y adaptable a reorganizaciones de los espacios.
Esto es importante en la mayoría de las instalaciones, que consiste en reprogramar los componentes necesarios para modificar los enlaces entre sensores y actuadores.
También cabe la posibilidad de usar dispositivos de distintos fabricantes.

Sistema de visualización
Aunque el EIB es un sistema descentralizado que no necesita por tanto ninguna centralita ni aparato de control central, pues todos los componentes se comunican directamente entre sí a través del Bus, es posible utilizar un sistema de visualización que mediante un PC, situado en el puesto de control del edificio, permite conocer el estado de todos los circuitos así como dar órdenes manualmente o programadas a cualquier punto del edificio.
Es un sistema fácilmente ampliable, modificable y adaptable a reorganizaciones de los espacios.
Esto es importante en la mayoría de las instalaciones, que consiste en reprogramar los componentes necesarios para modificar los enlaces entre sensores y actuadores.
También cabe la posibilidad de usar dispositivos de distintos fabricantes.
13. Desventajas del sistema EIB.
- En cuanto a sus principales desventajas serán:
- Presenta un elevado precio ya que los elementos de control necesitan de elementos adicionales para comunicarse con el sistema. El coste de los
- Página 16 de 17dispositivos también es alto, debido a que todos ellos tienen incorporados funcionalidades para hacer de éste un sistema distribuido.
- El poco grado en que se reduce el cableado. La mayoría de elementos que colocamos en el sistema necesitan de una alimentación mayor. Ésta alimentación coincide con la normalizada (220 V en corriente alterna), frente al rango de 15 a 30 V en corriente continua que suministra el bus. Es decir, se necesitará de la red eléctrica con lo que el trazado del bus será similar al de ésta.
- En edificios ya construidos tiene peores prestaciones estéticas que el sistema X10, pues necesita de un cableado extra que, si se oculta, supone un incremento sustancial en el coste (bastante más que si los cableados, eléctrico y de bus EIB se trazan a la vez). Si se opta por la utilización de dispositivos de radiofrecuencia, evidentemente estos son de un coste mayor que los aparatos normales.
14. Ejemplos de aplicación del KNX/EIB
- Ejemplo 1: Implementación de funciones centrales - cuando usted está dejando el edificio, todas las luces, el suministro de agua y enchufes específicos (horno eléctrico,…) puede apagarse, el sistema de alarma EIB puede activarse y las persianas pueden controlarse de distinta forma en función de la hora del día.
- Ejemplo 2: En salas de conferencias, teatros, así como en cuartos de estar, es posible activar diferentes escenas de iluminación que, en función de la actividad, pueden ser modificadas por el usuario en cualquier momento. Por ejemplo en edificios administrativos, es posible lograr una energía que ahorre hasta un 75% de la iluminación llevando a cabo un control de luz constante, con un sólo sensor de luminosidad para cada lado del edificio.
- Ejemplo 3: Pueden visualizarse y controlarse por medio de displays todos los estados de un piso (temperatura, estado de apertura de puertas y ventanas o encendido de luces, etc). Esto puede llevarse a cabo de la misma manera en instalaciones más grandes por medio de PCs y software de visualización.
- Ejemplo 4: Uniendo una instalación EIB con la red telefónica, el usuario puede controlar o consultar el estado de las funciones del edificio (por ej. la calefacción) usando un teléfono móvil. También pueden redirigirse las señales de alarma automáticamente al número de teléfono que se desee. Igualmente, pueden repararse remotamente instalaciones EIB y pueden ser configuradas por el instalador usando cualquier medio de comunicación disponible (por ej. Internet). Se reduce así de forma considerable el tiempo requerido para el mantenimiento de la gestión del edificio.
- Ejemplo 5: Una sala de conferencias grande debe poder ser divida en varias áreas independientes si la necesidad lo requiere. Insertando tabiques (paneles) de separación, la instalación EIB detecta automáticamente la asignación de interruptores y luminarias requerida para cada sección de la sala, no siendo necesario por consiguiente cambiar el cableado existente.
- Ejemplo 6: Instalación de interruptores de "pánico" (activación por ej. de todas las luces). Por la noche, las luces entre la alcoba de los niños y el baño pueden ser activadas apretando un botón y pueden ser desactivadas después de un periodo fijo.
- Ejemplo 7: El EIB puede proporcionar un control individual de la calefacción y ventilación de cada cuarto mediante el establecimiento de perfiles de temperatura individuales. Las entradas de frío o calor en cada cuarto se ajustan automáticamente cuando una ventana se abre. Estas medidas hacen posible alcanzar un ahorro de energía de más de un 30% al año. La generación de calor también puede controlarse en función de las necesidades de calor de cada cuarto individual (el calor sólo se produce cuando realmente se requiere).
- Ejemplo 8: El EIB también puede realizar una simulación de presencia cuando el usuario esté ausente.
15. Referencias:
- Curso(libre configuración )instalaciones domótica y edificios inteligenes.
- http://www.slideshare.net/josualvarezperez/eibknx
- http://prodomotica.blogspot.com.es/2010/05/direccion-fisica-en-eib.html
- http://prodomotica.blogspot.com.es/2010/05/direccion-de-grupo-en-eib.html
- Automatización Integral de Edificios (AIdeE) – E.P.S. Ingeniería de Gijón
- Automatización de viviendas y edificios. Rubén Saavedra Silveira
- http://www.eingenieria.eu/html/pagina.php?par_idioma=es&par_opcion=2&va_tipo=30
- http://ingecasa.com/Sistema%20EIB.pdf
- http://www.salesianoscadiz.com/Descargas/Escolar/FP/Ciclos/Electrotecnia/2do/023...
- http://ieshlanz.com/departamentos/electricidad%20y%20electronica/informacion%20p...
- http://bibing.us.es/proyectos/abreproy/11371/fichero/Volumen1%252FCapitulo3.pdf
- http://www.mcgraw-hill.es/bcv/guide/capitulo/8448199464.pdf
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()