Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
Revisión de Ejercicio práctico, junio de 2006 (4 puntos) de 4 June, 2008 - 18:39
12 September, 2007 - 09:54 — alvaro.fernandez
 Versión para imprimir
Versión para imprimir
Se desea diseñar el sistema de control de la figura. Teniendo en cuenta las características propias de la aplicación, se ha optado por diseñar un sistema de control exento de error de posición y con un error de velocidad menor del 10%. El tiempo de asentamiento deberá ser inferior a 1 segundo, y el sobreimpulso máximo admitido es del 5%.
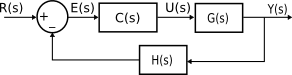 $C(s)=K_1$, $G(s)=\frac{1}{(s^2+3s)}$ y $H(s)=K_2s+1$
$C(s)=K_1$, $G(s)=\frac{1}{(s^2+3s)}$ y $H(s)=K_2s+1$
- Obtener las relaciones que deben satisfacer K1 y K2 para que se cumplan los requerimientos del diseño.
- Dibujar sobre el plano S la región donde deben ser ubicados los polos de lazo cerrado para que se cumplan las especificaciones temporales.
- Escoger un valor adecuado para K1 y K2.
- Calcular analíticamente el error estático de posición y de velocidad que cometerá el sistema.
- Simule el comportamiento del sistema frente a una entrada de tipo escalón y frente a una entrada de tipo rampa, comprobando el cumplimiento de los requisitos del diseño.
- Compruebe mediante simulación si se cumplen los cálculos del apartado 4).
Resolución:
Los requerimientos del diseño son:
Error de posición --> ess (pos)= 0
Error de velocidad --> ess (vel)< 10%
Tiempo de establecimiento --> ts (2%)< 1 seg
Sobreimpulso --> Mp< 5%
En primer lugar vemos de que tipo es el sistema calculando su FT de lazo abierto, que es:
$\ FT = C(s) \cdot G(s) \cdot H(s) = K_1 \cdot \frac{1}{{(s^2 + 3s)}} \cdot (K_1 s + 1) = \frac{{K_1 K_2 s + K_1 }}{{s(s + 3)}}
\$Vemos que es de tipo 1, por lo que el eSS (pos) será cero, por lo que no hace falta calcularlo.
Para calcular el ess(vel) lo haremos de dos modos: uno usando la expresión del error de realimentación, y otro usando el error real.
Modo 1--> El error de realimentación a partir del diagrama de bloques es:
$\ \left. \begin{array}{l}
\mu (s) = Y(s) \cdot H(s) \\
E(s) = R(s) - \mu (s) \\
Y(s) = E(s) \cdot C(s) \cdot G(s) \\
\end{array} \right\}E(s) = R(s) - E(s) \cdot C(s) \cdot G(s) \cdot H(s){\rm{ }} \Rightarrow
\$
$\ \Rightarrow {\rm{ }}E(s) = R(s)\frac{1}{{1 + C(s) \cdot G(s) \cdot H(s)}} = R(s)\frac{{s(s + 3)}}{{s(s + 3) + K_1 (1 + K_2 s)}}
\$
Ahora aplicamos el teorema del valor final con una señal de entrada rampa R(s)=1/s2:
$\ e_{ss} (vel) = \ {\lim }\limits_{x \to 0} s \cdot E(s) = \ {\lim }\limits_{x \to 0} s \cdot R(s)\frac{{s(s + 3)}}{{s(s + 3) + K_1 (1 + K_2 s)}} =
\$
$\ = \ {\lim }\limits_{x \to 0} s \cdot \frac{1}{{s^2 }} \cdot \frac{{s(s + 3)}}{{s(s + 3) + K_1 (1 + K_2 s)}} = \frac{3}{{K_1 (1 + 0)}} = \frac{3}{{K_1 }}
\$
Sabemos que uno de los requisitos que tiene que cumplir es que ess (vel)< 10%, por tanto:
$\ \frac{3}{{K_1 }} < 0,1{\rm{ }} \Rightarrow {\rm{ }}K_1 > \frac{3}{{0,1}}{\rm{ }} \Rightarrow {\rm{ }}K_1 > 30
\$
Calculamos la FT de lazo cerrado para ver qué orden tiene el sistema:
$\ FTLC = \frac{{Y(s)}}{{R(s)}} = \frac{{C(s) \cdot G(s)}}{{1 + C(s) \cdot G(s) \cdot H(s)}} = \frac{{K_1 \frac{1}{{(s^2 + 3s)}}}}{{1 + K_1 \frac{1}{{(s^2 + 3s)}}(K_2 s + 1)}} =
\$
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()