Inicie su sesión para modificar los apuntes, usar los foros, etc. Si no es usuario de la web, regístrese.



Contenidos licenciados 
![]()
Revisión de Problema 3 Examen de Diciembre 2009 de 24 December, 2009 - 03:36
21 December, 2009 - 22:03 — joaquinm13
 Versión para imprimir
Versión para imprimir
a) El plano S para un sobreimpulso máximo del 10% y un tiempo de asentamiento menor de 8 segundos, es el resultante.
\[ M_p < 10\% = 0.1\]
\[M_p = e^{\frac{{ - \delta \pi }}{{\sqrt {1 - \delta ^2 } }}} \]
\[\delta = \sqrt {\frac{{(LnM_p )^2 }}{{\pi ^2 + (LnM_p )^2 }}} \Rightarrow \delta \geq 0.5911\]
\[t_s < 8s.\]
\[
\delta = 0.5911
\]
\[
\cos \beta = \delta
\] ; \[
\beta = ar\cos (0.5911)
\] = 53.73º
\[
t_s \approx \frac{4}
{{\delta w_n }} < 8s \xrightarrow{{}}\delta w_n > \frac{4}
{8};\delta w_n > 0.5
\]

Para que se cumpla las especificaciones de sobreimpulso y tiempo de asentamiento dado los polos deben de estar dentro del plano S dibujado.
b) Para un error de posición inferior al 6% la k será la siguiente.
E(s)= R(s)-B(s)
B(s)= H(s)* Y(s)
Y(s)= E(s)*C(s)*G(s)
\[
E(s) = R(s)\frac{1}
{{1 + H(s)*C(s)*G(s)}}
\]
\[
E(s) = R(s)\frac{{(0.4s + 1)(3s + 1)(s + 0.1)}}
{{(0.4s + 1)(3s + 1)(s + 0.1) + k(s + 0.5)}}
\]
\[
x(\infty ) = \mathop {Lim}\limits_{s \to 0} s\frac{1}
{s}\frac{{(0.4s + 1)(3s + 1)(s + 0.1)}}
{{(0.4s + 1)(3s + 1)(s + 0.1) + k(s + 0.5)}}
\]
\[
\frac{{0.1}}
{{0.1 + 0.5K}} < 0.06;K > 3,13
\]
Para que el error de posición del sistema sea inferior a 6% K debe de ser mayor a 3.13
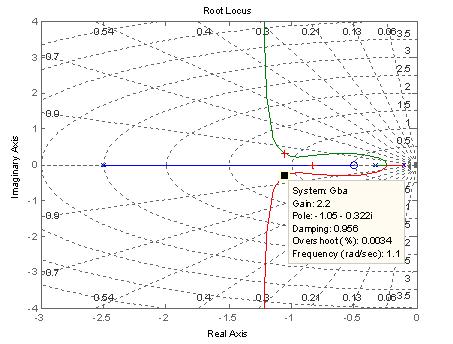
c) Para que se cumpla las especificaciones la K debe de estar dentro del plano S descrito anteriormente y ser mayor de 3.13, por ello usare una K de 3.3
d) la simulación es la siguiente
clc,clear all, close all;
%K=3.2;
G=tf([1 0.5],[3 1.3 0.1])
H=tf([1],[0.4 1])
Gba=series(G,H);
rlocus(Gba)
sgrid
K=rlocfind(Gba)
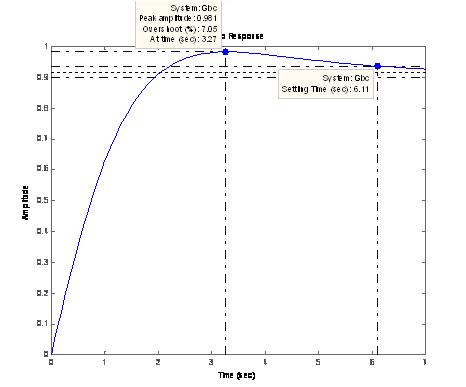
figure
Gbc=feedback(K*G,H)
%veo respuesta sistema
step(Gbc)
%otra grafica para ver el error posicion
figure
[y,t]=step(Gbc);
plot(t,y)
hold on
X=ones(1,length(t));
plot(t,X,'k--')
hold off
error_posicion=(1-y(end))*100


En el grafico anterior se observa que como hemos seleccionado una ganancia K de 3.3 aproximadamente y que esta dentro del plano S dibujado anteriormente. Pero se observa que de algún modo solo cumplimos las especificaciones de error del 6% y el tiempo de asentamiento ya que es sobre impulso obtenido es del 11.9%, un 1.9% mas de lo deseado, en definitiva esta ganancia aproximadamente será la mas deseada por nosotros aunque asumamos ese 1.9% mas de sobre impulso. Ya que veremos que para un gran amplio margen de las ganancias, el tiempo de asentamiento se cumple, pero para el caso del sobreimpulso y del error de posición si uno mejor el otro empeora.
Para k>3.3


Se observa como que el error de posición disminuye a mayor ganancia de K, pero el sobre impulso aumenta cada vez mas cuanto mas no alejemos del eje real.
Para que el sobreimpulso sea menor del 10% tenemos que desplazarnos hacia la derecha en el eje real disminuyendo la ganancia
Para k<3.13
Para esta zona a la derecha de K=3.13 el sobreimpulso disminuye pero el error aumenta es de un 7.33% e ira aumentado cuanto menor sea la ganancia.
e) para un error de posición inferior al 1% quedara una restricción de k como la siguiente.
- Versión para imprimir
- Inicie sesión para enviar comentarios
Contenidos licenciados bajo Creative Commons by-sa 3.0

![]()